
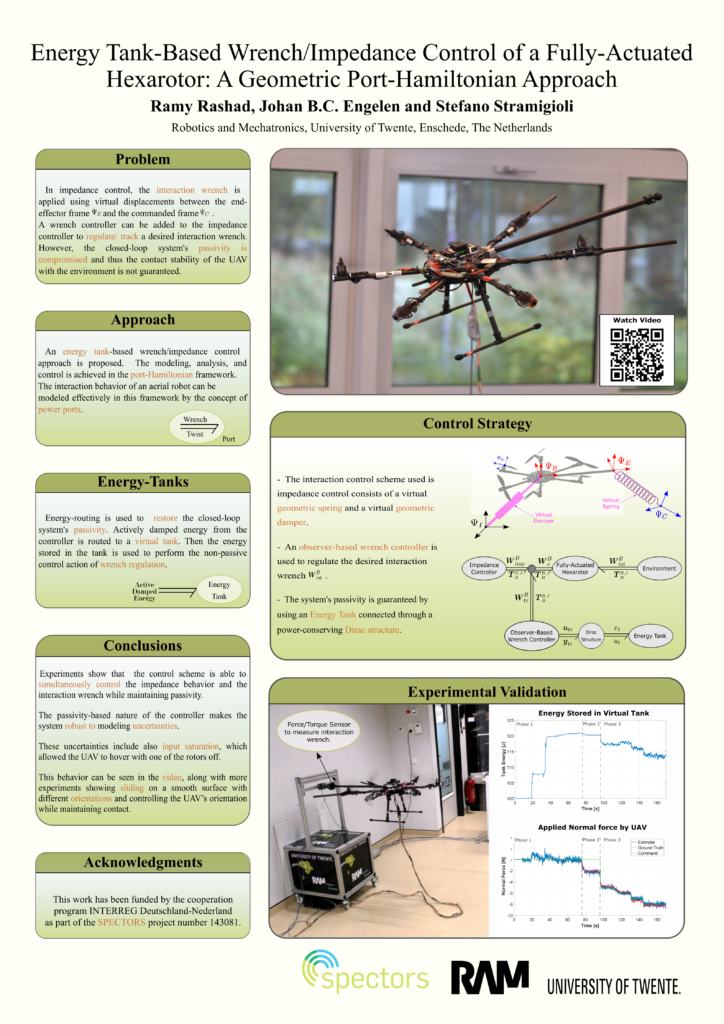
My poster presentation at the 2019 IEEE International Conference on Robotics and Automation (ICRA) which was held on 20-24 May 2019 in Montreal, Canada. The poster summarizes our conference paper:
Ramy Rashad, Johan B. C. Engelen, Stefano Stramigioli (2019) Energy Tank-Based Wrench/Impedance Control of a Fully-Actuated Hexarotor: A Geometric Port-Hamiltonian Approach, 2019 International Conference on Robotics and Automation (ICRA) 2019-May, p. 6418-6424, IEEE, doi:10.1109/ICRA.2019.8793939

Watch more details on the paper’s video: