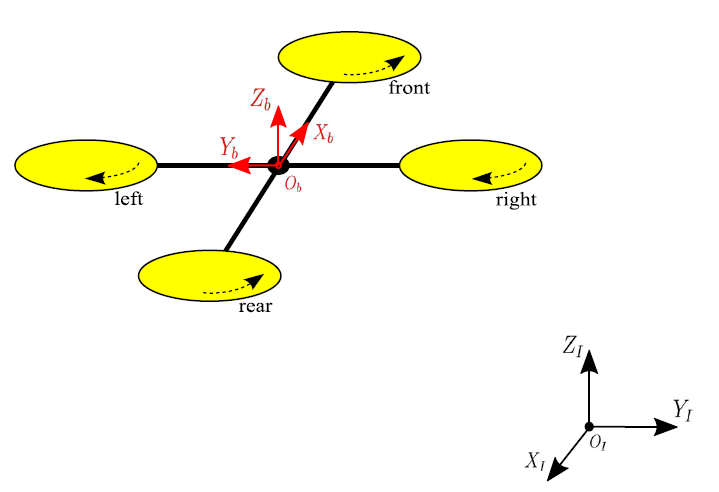
Research Overview Unmanned Aerial Vehicles (UAVs) have attracted many researchers with different specialties during the last decade. One of the most popular vehicles is the quadrotor helicopter. Quadrotor […]

Nonlinear Control
Posted on:
Twin Rotor MIMO system
Research Overview The twin rotor MIMO system (TRMS) is a aerodynamical laboratory setup which resembles a helicopter prototype designed for flight control experiments. The control system design of […]
Nonlinear Control
Posted on:
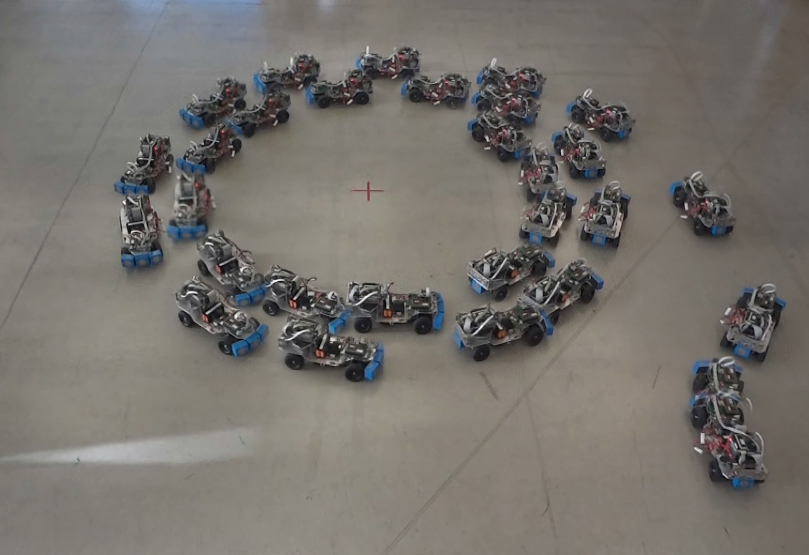
Dynamic trajectory tracking of a car-like robot
Research Overview This video summarizes my BSc thesis work done at the Julius Maximilians University Weurzburg, Germany as part of my BSc degree in Mechatronics at the German […]