BEST PAPER AWARD WINNER OF IEEE SSRR 2019
Research Overview
In impedance control, the contact force between the UAV’s end-effector and the environment is directly related to the controller’s stiffness and damping parameters. However, achieving a consistent performance of the UAV during interaction tasks requires a-priori knowledge of the surface geometry and contact properties. This contradicts the main advantage of impedance control to effectively work in unstructured and unmodeled environments. In general, the geometric properties of the environment can be acquired by the robot through visual perception. As for the mechanical contact properties, such as stiffness and friction, one approach is to automatically change the impedance parameters online to improve the interaction behavior.
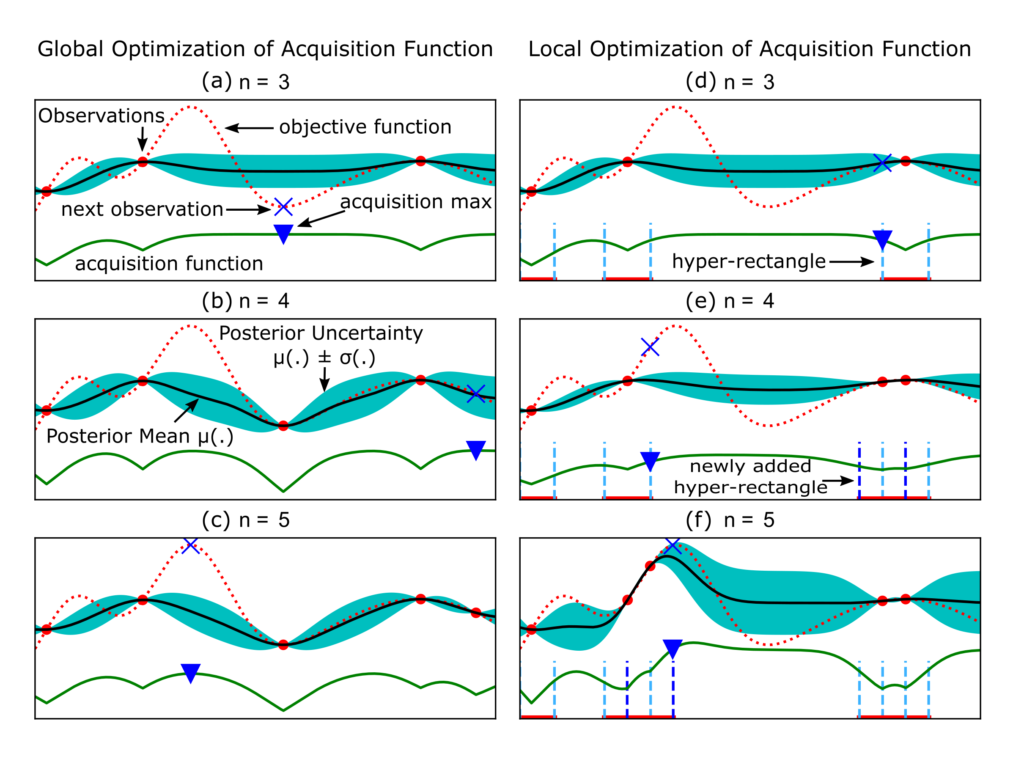
The focus in this research is on tasks requiring a fixed set of parameters values throughout operation. Examples of such tasks include surface contact tasks like grinding, cleaning, painting and writing. Considering such tasks, the optimal set of parameters values are greatly dependent on the combined mechanical properties of the surface and the UAV’s end-effector. The aim is to perform efficient trial-and error learning to automatically find the optimal parameters values. With reference to the Fig. above, the learning problem is formulated as the problem of finding the position of the global maximum of a black-box reward function f(x) using as few evaluations as possible to minimize the learning cost, where the function being optimized represents a performance measure for the UAV under a selected set of impedance parameters values x.
The learning algorithm we used is based on the Bayesian optimization framework combined with Gaussian processes. The advantages of our approach compared to other techniques include: exploiting the system knowledge available, guarantying contact stability and enhancing sample efficiency. The issue of sample efficiency is crucial for aerial robots due to its very limited operation time. Another relevant issue is that the parameters space is not completely safe to explore. The safe learning is invoked in our approach by a novel modification to the standard technique of globally optimizing acquisition functions in Bayesian optimization, depicted in the Fig. below.
Publications
| A. Khattab, R. Rashad, J.B.C. Engelen, S. Stramigioli (2019) Bayesian-Optimized Impedance Control of an Aerial Robot for Safe Physical Interaction with the Environment, 2019 IEEE International Symposium on Safety, Security, and Rescue Robotics, SSRR 2019, doi:10.1109/SSRR.2019.8848967 Asem Khattab, Towards an Interactive Drone: A Bayesian Optimization Approach, University of Twente (Aug 2018), Supervisors: R. Rashad, J. Engelen, S. Stramigioli |