Research Overview
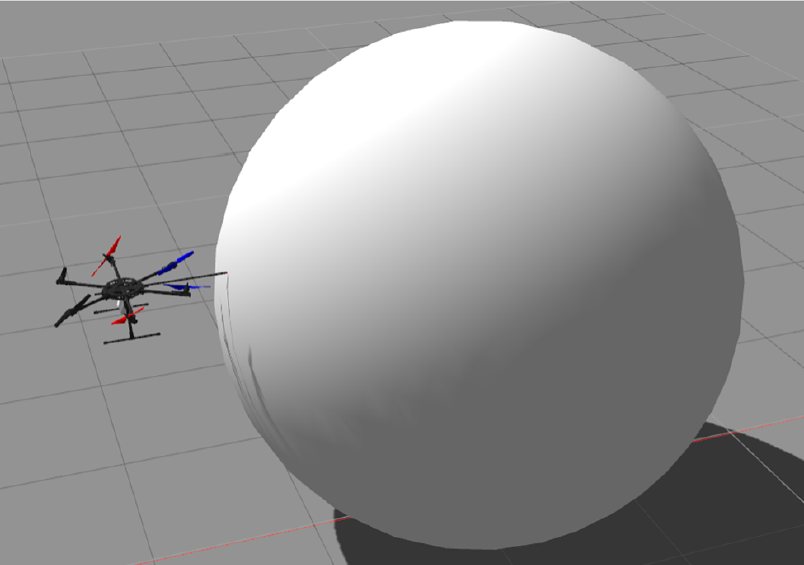
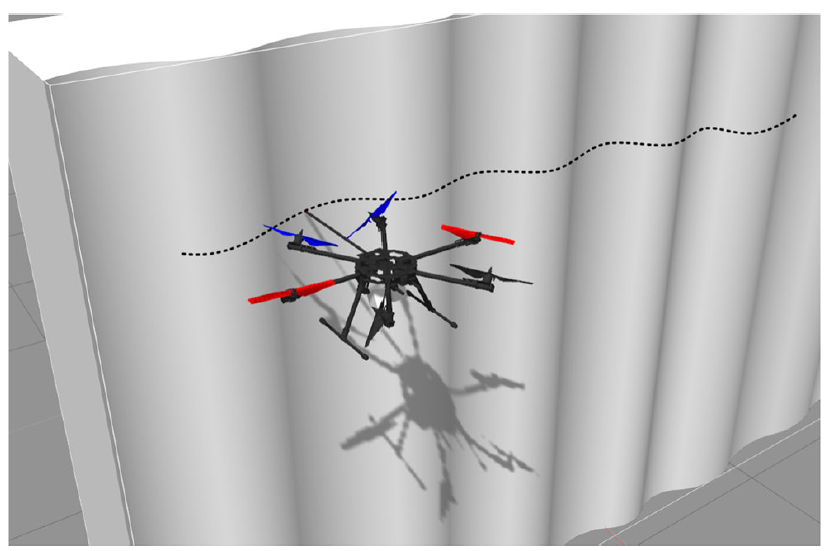
This work focuses on the automatic aerial contact-based sliding interaction (inspection/cleaning) tasks in aerial robotics allowing a 3D force with a constant norm to be applied on generic surfaces with unknown geometry. The interaction task is achieved by a fully-actuated hexarotor equipped with a rigidly attached end-effector under a passivity-based geometric impedance controller and a new sliding-mode extended state observer to estimate the interaction wrench. In order to increase the observer performance and reduce the estimation chattering phenomenon, the observer is innovatively incorporated with a super-twisting algorithm and a sigmoid function with a switching gain being adaptively updated by a fuzzy logic system.
Publications
| Ran Jiao, Ramy Rashad, Davide Bicego, Wusheng Chou, Stefano Stramigioli (2021) Observer-based Geometric Impedance Control of a Fully-Actuated Hexarotor for Physical Sliding Interaction with Unknown Generic Surfaces, Journal of Intelligent and Robotic Systems: Theory and Applications 102(4), Journal of Intelligent & Robotic Systems, doi:10.1007/s10846-021-01434-x |