Research Overview
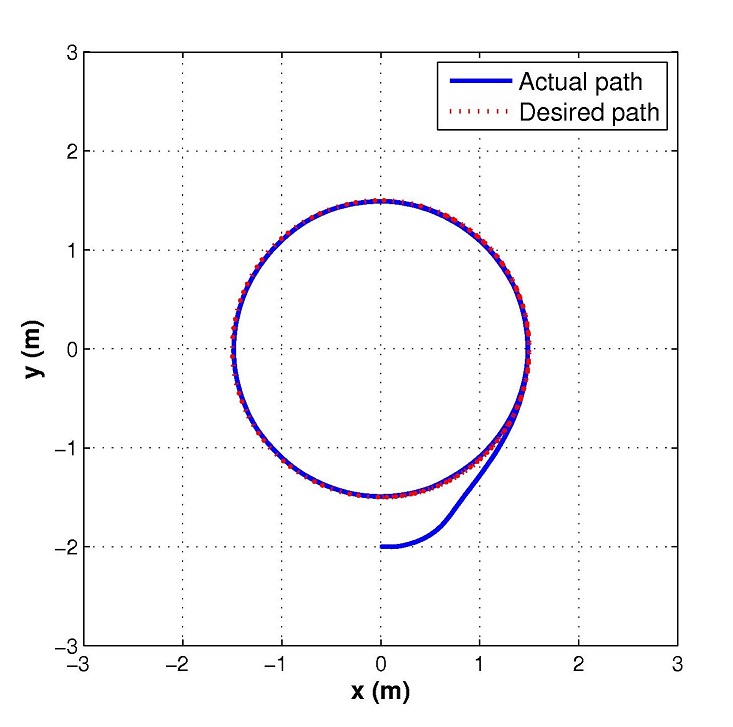
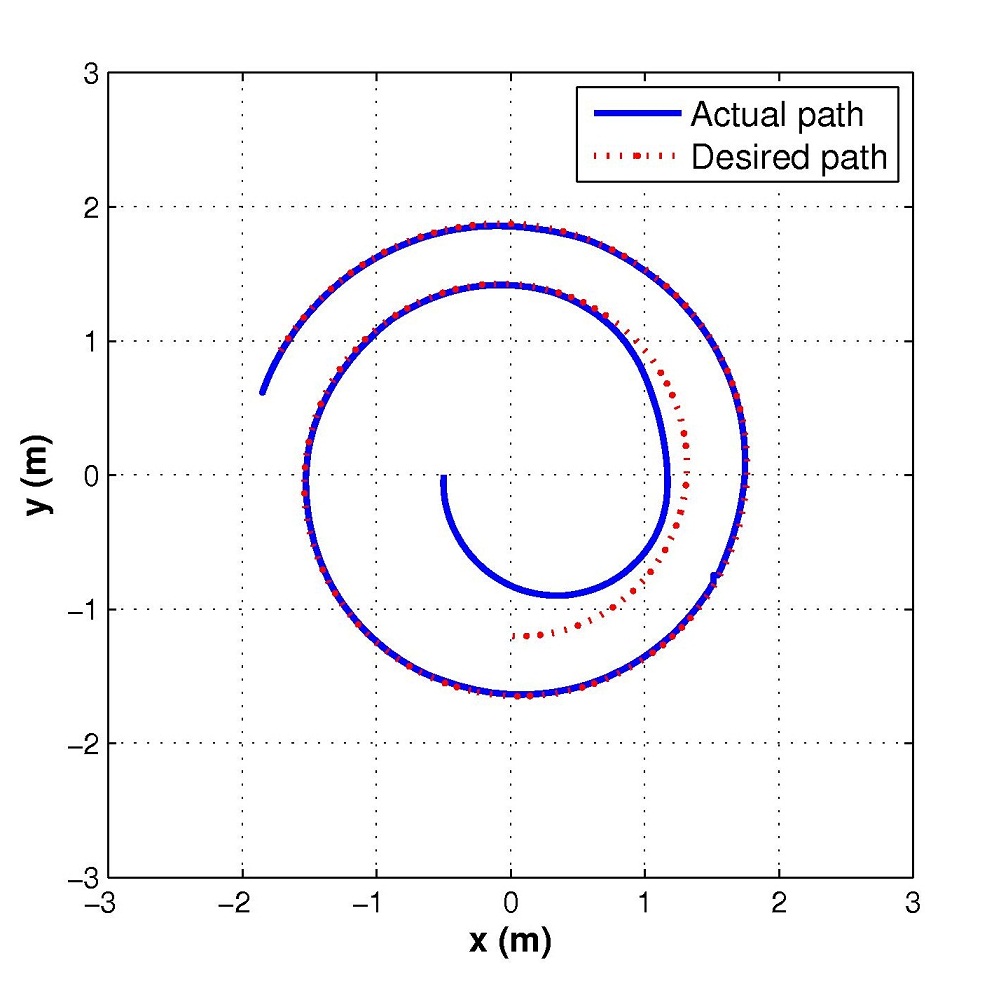
This video summarizes my BSc thesis work done at the Julius Maximilians University Weurzburg, Germany as part of my BSc degree in Mechatronics at the German University in Cairo. The work focuses on the trajectory tracking problem for a car-like robot. Tracking a trajectory is one of the basic motion control tasks for any wheeled mobile robot. Two different approaches are presented and analyzed to control the kinematic model of a car-like robot in order to track an obstacle-free arbitrary trajectory. The first approach is tracking the trajectory by stabilizing the error dynamics using phase plane analysis. The second approach uses dynamic feedback linearization to solve the problem. Both designed controllers are implemented on a real car-like robot.


Publication
| Dynamic trajectory tracking of a car-like robot, German University in Cairo, Egypt & Julius-Maximilians – University Weurzburg, Germany (2012). pdf:[URL] |