
Research Overview
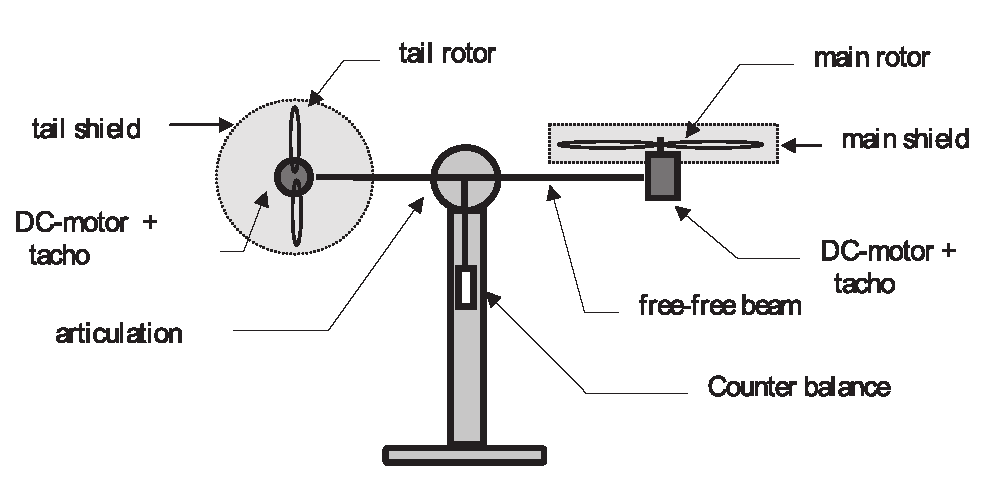
The twin rotor MIMO system (TRMS) is a aerodynamical laboratory setup which resembles a helicopter prototype designed for flight control experiments. The control system design of the TRMS is challenging since its mathematical model is a high order nonlinear system with heavy cross-coupling effects between the two propellers. In this research, a number of nonlinear control systems are developed and validated on the TRMS model.
The first control system combines the integral backstepping technique, disturbance observers and the command filtering extension. The controller is formulated for a class of square and affine nonlinear systems which can be written in strict feedback form. This class of systems represents several fully actuated m-degrees-of-freedom (m-DOF) mechanical systems. Other examples of such systems include m-DOF robotic manipulators and 6-DOF underwater vehicles. A disturbance observer is augmented to the backstepping-based controller to estimate disturbances in the system model. These disturbances can be due to constant external sources, unmodeled dynamics or modeled dynamics that are intentionally neglected such that the system model can be written in strict feedback form. Thus, the proposed approach is applicable to a wider class of systems that can be written in strict feedback form by neglecting certain parts of the dynamics that cause cross-coupling. To counteract the disturbance estimation error, integral action is utilized to eliminate this error. Finally, the approach computes the command signal derivatives using low pass filters. The benefits of the presented control approach include: (1) retaining the advantages of the standard backstepping technique which provides the designer with a systematic, decoupled and flexible design methodology; (2) providing the system with active disturbance rejection properties, thus avoiding the drawbacks of integral control which would have risen if it was used alone to reject time varying disturbances; and, (3) eliminating the complexity of deriving the command signals analytically or differentiating them through the use of command filters. The detailed stability analysis of the overall closed loop system is presented based on singular perturbation theory and Lyapunov stability arguments.
The second control system is a sliding mode controller (SMC) driven by a sliding mode disturbance observer (SMDO) is utilized to develop a tracking controller for the TRMS. A nonlinear SMC law is derived and driven by a SMDO which provides estimates of the unmodeled dynamics and external disturbances present in the system. Hence, chattering in the control signals is eliminated rather than attenuated. In addition, the proposed approach can handle arbitrary external disturbances without affecting the continuous nature of the control signals. This is in contrast to other approaches which require a higher discontinuity to reject higher disturbances, thus chattering might appear.
Publications
| Ramy Rashad, Ahmed Aboudonia, Ayman El-Badawy (2016) A novel disturbance observer-based backstepping controller with command filtered compensation for a MIMO system, Journal of the Franklin Institute 353(16), p. 4039-4061, Elsevier, doi:10.1016/j.jfranklin.2016.07.017 Ramy Rashad, Ayman El-Badawy, Ahmed Aboudonia (2017) Sliding mode disturbance observer-based control of a twin rotor MIMO system, ISA Transactions 69, p. 166-174, Elsevier Ltd, doi:10.1016/j.isatra.2017.04.013 |