Research Overview
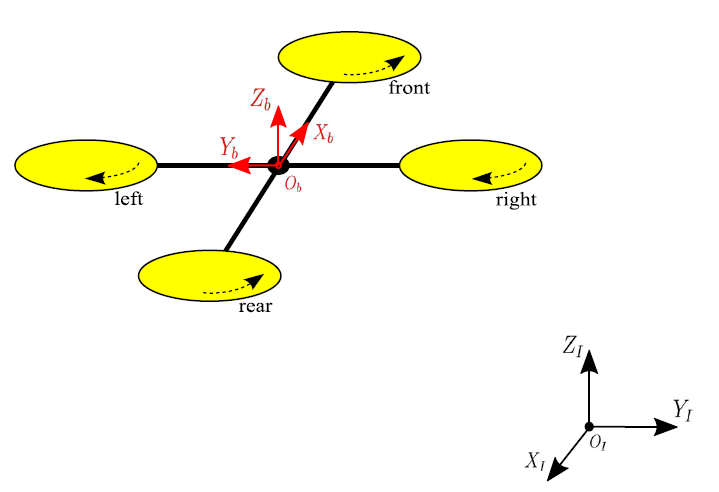
Unmanned Aerial Vehicles (UAVs) have attracted many researchers with different specialties during the last decade. One of the most popular vehicles is the quadrotor helicopter. Quadrotor helicopters have the advantage of hovering, vertical landing and taking-off with high maneuverability. Contrary to fixed wing aircraft control, it is difficult to design a decoupled control law that stabilizes the quadrotor dynamics due to the strong coupling between the roll, pitch and yaw nonlinear dynamics in addition to the rotor dynamics. Therefore many researchers have focused on designing multiple-input multiple-output nonlinear controllers that guarantee the quadrotor’s stability and improved performance during flight.
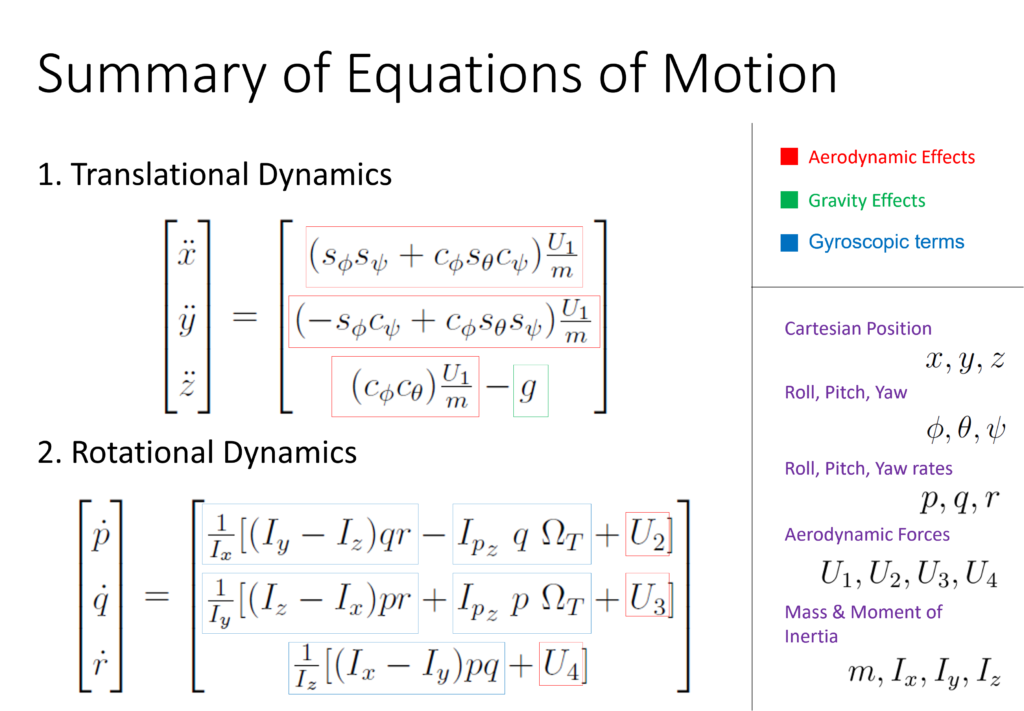
In this line of work, we used the quadrotor dynamic model as a case study for the development of disturbance observer-based nonlinear control systems to stabilize the quadrotor dynamics in the presence of matched and/or mismatched disturbances. These methods include:
- Backstepping control
- Sliding mode control
- Feedback linearization
- Model reference adaptive control

Publications
| Robust Model Reference Adaptive Control of a Quadrotor Unmanned Aerial Vehicle, German University in Cairo, Egypt (2015). pdf:[URL] Ramy Rashad, Ahmed Aboudonia, Ayman El-Badawy (2015) Backstepping trajectory tracking control of a quadrotor with disturbance rejection, 2015 25th International Conference on Information, Communication and Automation Technologies, ICAT 2015 – Proceedings, IEEE, doi:10.1109/ICAT.2015.7340523 Ahmed Aboudonia, Ramy Rashad, Ayman El-Badawy (2015) Time domain disturbance observer based control of a quadrotor unmanned aerial vehicle, 2015 25th International Conference on Information, Communication and Automation Technologies, ICAT 2015 – Proceedings, p. 6-11, IEEE, doi:10.1109/ICAT.2015.7340501 Ahmed Aboudonia, Ayman El-Badawy, Ramy Rashad (2016) Disturbance observer-based feedback linearization control of an unmanned quadrotor helicopter, Proceedings of the Institution of Mechanical Engineers. Part I: Journal of Systems and Control Engineering 230(9), p. 877-891, doi:10.1177/0959651816656951 Ahmed Aboudonia, Ayman El-Badawy, Ramy Rashad (2017) Active anti-disturbance control of a quadrotor unmanned aerial vehicle using the command-filtering backstepping approach, Nonlinear Dynamics 90(1), p. 581-597, Springer Netherlands, doi:10.1007/s11071-017-3683-y Ahmed Aboudonia, Ramy Rashad, Ayman El-Badawy (2018) Composite Hierarchical Anti-Disturbance Control of a Quadrotor UAV in the Presence of Matched and Mismatched Disturbances, Journal of Intelligent and Robotic Systems: Theory and Applications 90(1-2), p. 201-216, Journal of Intelligent & Robotic Systems, doi:10.1007/s10846-017-0662-y |