Research Overview
The integration of computer vision techniques for the accomplishment of autonomous interaction tasks represents a challenging research direction in the context of aerial robotics. In this paper, we consider the problem of contactbased inspection of a textured target of unknown geometry and pose. Exploiting state of the art techniques in computer graphics, tuned and improved for the task at hand, we designed a framework for the projection of a desired trajectory for the robot end-effector on a generically-shaped surface to be inspected.
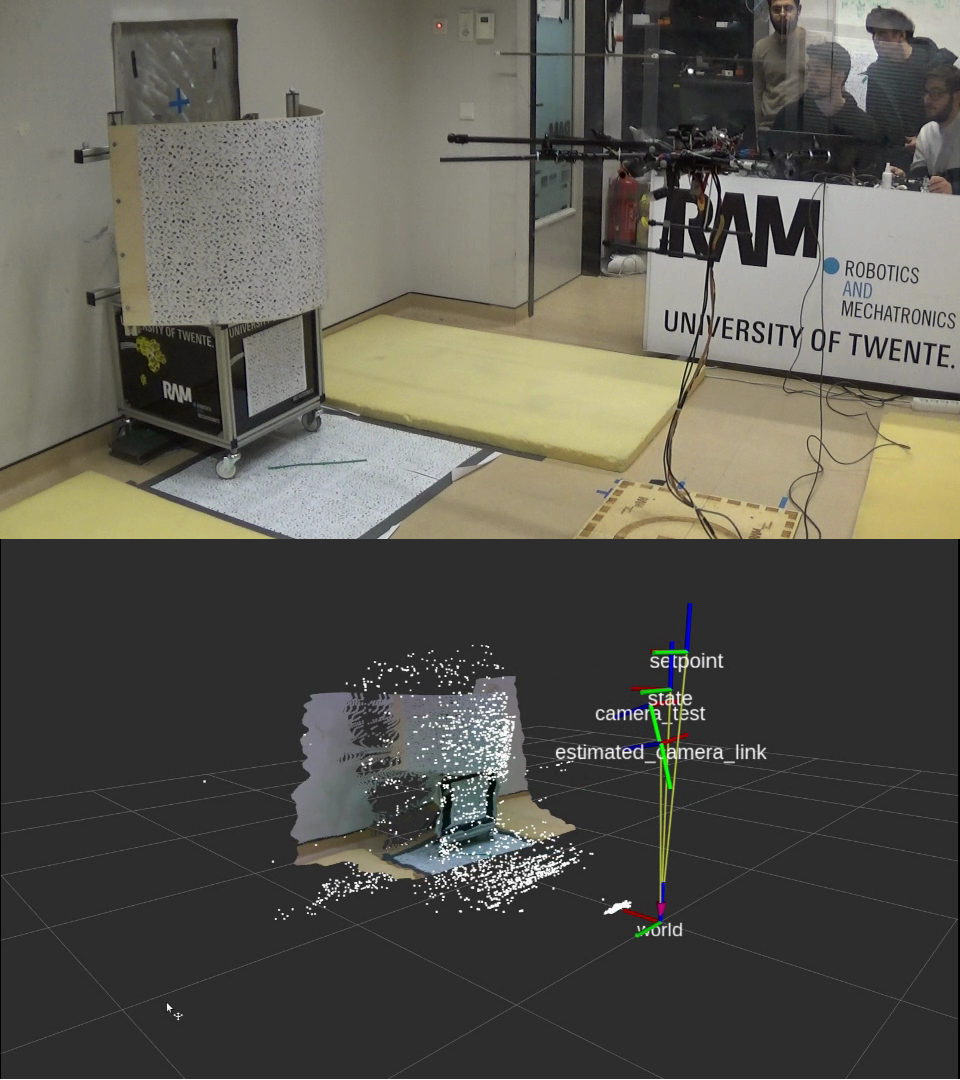
Combining these results with previous work on energybased interaction control, we are laying the basis of what we call vision-based impedance control paradigm. To demonstrate the feasibility and the effectiveness of our methodology, we present the results of both realistic ROS/Gazebo simulations and preliminary experiments with a fully-actuated hexarotor
interacting with heterogeneous curved surfaces whose geometric description is not available a priori, provided that enough visual features on the target are naturally or artificially available to allow the integration of localization and mapping algorithms.
Publications
| Ramy Rashad, Davide Bicego, Ran Jiao, Santiago Sanchez-Escalonilla, Stefano Stramigioli (2020) Towards vision-based impedance control for the contact inspection of unknown generically-shaped surfaces with a fully-actuated UAV, IEEE International Conference on Intelligent Robots and Systems(143081), p. 1605-1612, doi:10.1109/IROS45743.2020.9341203 |
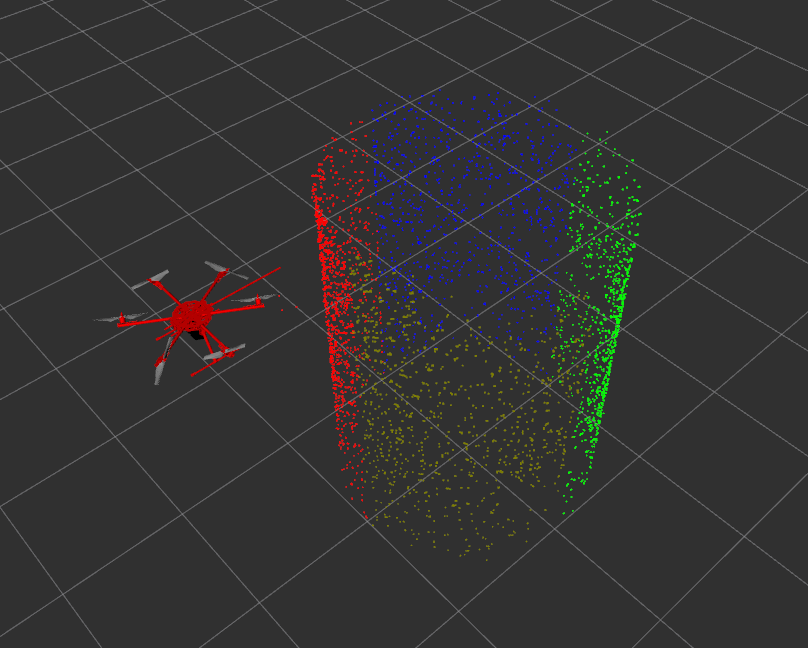
| B. Sirmacek, R. Rashad, P. Radl (2019) Autonomous uav-based 3d-reconstruction of structures for aerial physical interaction, International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences – ISPRS Archives 42(2/W13), p. 601-605, doi:10.5194/isprs-archives-XLII-2-W13-601-2019 Patrick Radl, 3D reconstruction improvement by path planning towards physical interaction with a UAV, University of Twente (Jun 2019), Supervisors: R. Rashad, B. Sirmaçek, F. van der Heijden Rajavarman Mathivanan, Texture Based Autonomous Reconstruction of 3D Point Cloud Model using Fully Actuated UAVs, University of Twente (Jul 2020), Supervisors: R. Rashad, D. Bicego, G. Krijnen |