This work has been published as Ch.4 of my PhD thesis.
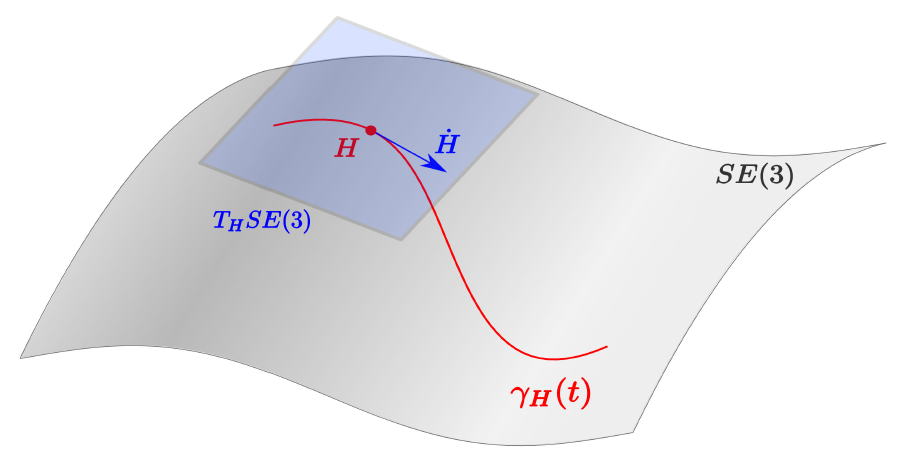
The study of rigid body modeling is central to the mathematical theories of robotics. The topic of rigid bodies is a recurrent theme for serial and parallel rigid manipulators as well as for ground, underwater, and aerial mobile robots. In this work, we consider the problem of modeling rigid body motion in the port-Hamiltonian framework using the Lie group approach for describing rigid body kinematics.