Research Overview
Several fully-actuated multirotor platforms have been introduced in the past decade to overcome the underactuation property of conventional multirotors. Full-actuation has been mainly realized by two techniques; either by having fixed propellers with dissimilar orientations, which we refer to as fixed-tilt concepts, or by actively tilting propellers using extra actuators, which we refer to as variable-tilt concepts.
The problem with fully-actuated UAV concepts is that the optimal rotor configuration is application-dependent, contrary to underactuated concepts which usually have the orientation of their rotors to be vertical in an in-plane symmetric configuration. To achieve full-actuation, the orientation and location of the rotors needs to be altered, which results in a wide range of possible rotor configurations. Depending on the requirements of the application, this results in a vast variety of different possible concepts.
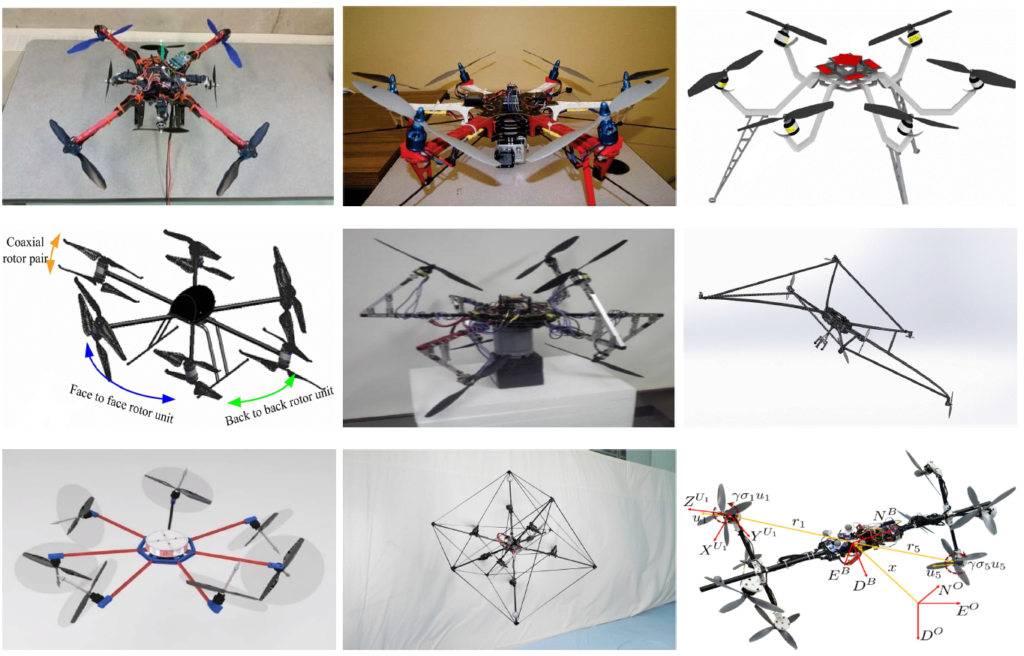
In this research work we present a review of the available concepts in the aerial robotics literature suggested for achieving fully-actuated flight. The focus is mainly on fully-actuated multi-rotor UAVs using propellers only for propulsion since they are more popular in the aerial robotics literature. The surveyed concepts are divided into fixed-tilt multirotors and variable-tilt multirotors. The work also includes a review of the optimization criteria used in the literature for optimizing the design parameters of fixed-tilt multirotor UAVs. Moreover, a static wrench analysis has been utilized to systematically derive the control allocation matrix in a unified frame of reference for all the surveyed concepts.
Publication
| Ramy Rashad, Jelmer Goerres, Ronald Aarts, Johan B.C. Engelen, Stefano Stramigioli (2020) Fully Actuated Multirotor UAVs: A Literature Review, IEEE Robotics and Automation Magazine 27(3), p. 97-107, IEEE, doi:10.1109/MRA.2019.2955964 Jelmer Goerres, Framework for comparing and optimizing of fully actuated multirotor UAVs, University of Twente (Feb 2019), Supervisors: R.Rashad, J. Engelen, R. Aarts |