Research Overview
Flapping flight is one of the wonders of nature and has been studied vastly by biologists and fluid dynamicists. The level of dexterity, efficiency and grace that birds exhibit along flight manoeuvres is far beyond what state-of-the-art technology can achieve. Furthermore, a complete description able to disentangle the complexity of the emerging fluid dynamic patterns and to yield an interpretation of all flight modes, is not covered by our theoretical understanding. Even if this lack of knowledge is recognised worldwide, it remains astonishing, especially if one thinks that the basic principles which play a role in flight are rooted in classical physics of continua. The reason is that classical physics can be very mysterious when it comes to fluid dynamics, especially in those regimes where viscosity, turbulence and vortex generation are important. These are exactly the aerodynamic phenomena that birds use in flapping flight, generating lift and thrust by means of sophisticated generation of unsteady aerodynamic patterns interacting on their wings.
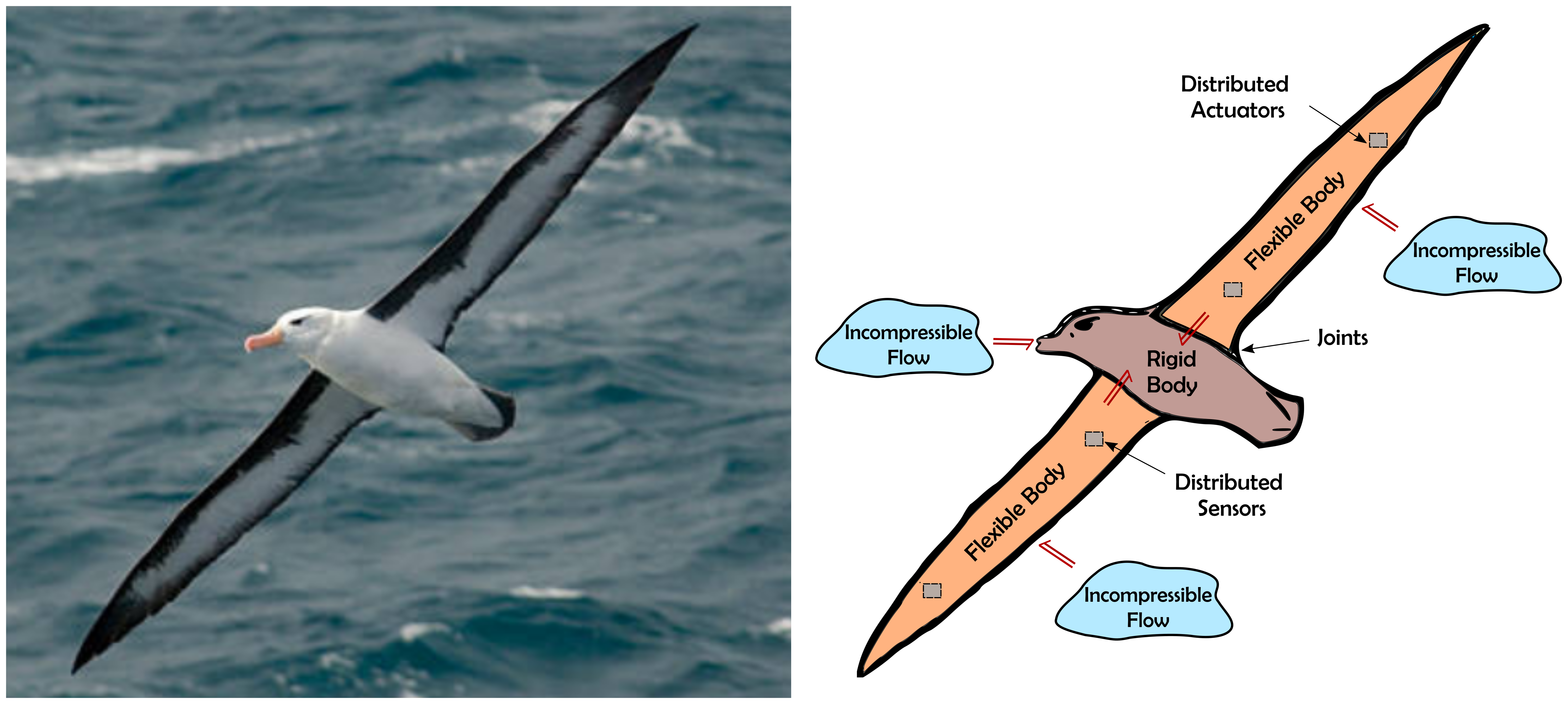
In the publication below we embody the vision of the PortWings project, an ERC advanced grant willing to ride the wave of the technological opportunity of developing a robotic bird with the addition of a peculiar modelling strategy: we describe the fluid-solid interaction system starting from first principles, in the framework of port-Hamiltonian system theory and its physically unifying character, which will couple fluid dynamics to dynamically changing surfaces of the wing and their actuation. In fact, in order to decode flapping flight in its whole generality, it is important to avoid the use of quasi-steady aeroelastic models, which made the fortune of fixed-wing technology. Pushing the port-Hamiltonian methodology forward, it is possible to handle dynamic boundary conditions as fundamental part of the system, while preserving the true power flow between the two continua in the game, without simplifying the underlying physical models. In this way we expect to gain new insight in fluid patterns and their evolution along unsteady solutions.
Publication
| Federico Califano, Ramy Rashad, Alexander Dijkshoorn, Luuk Groot Koerkamp, Riccardo Sneep, Andrea Brugnoli, Stefano Stramigioli (2021) Decoding and realising flapping flight with port-Hamiltonian system theory, Annual Reviews in Control 51(March), p. 37-46, Elsevier Ltd, doi:10.1016/j.arcontrol.2021.03.009 |
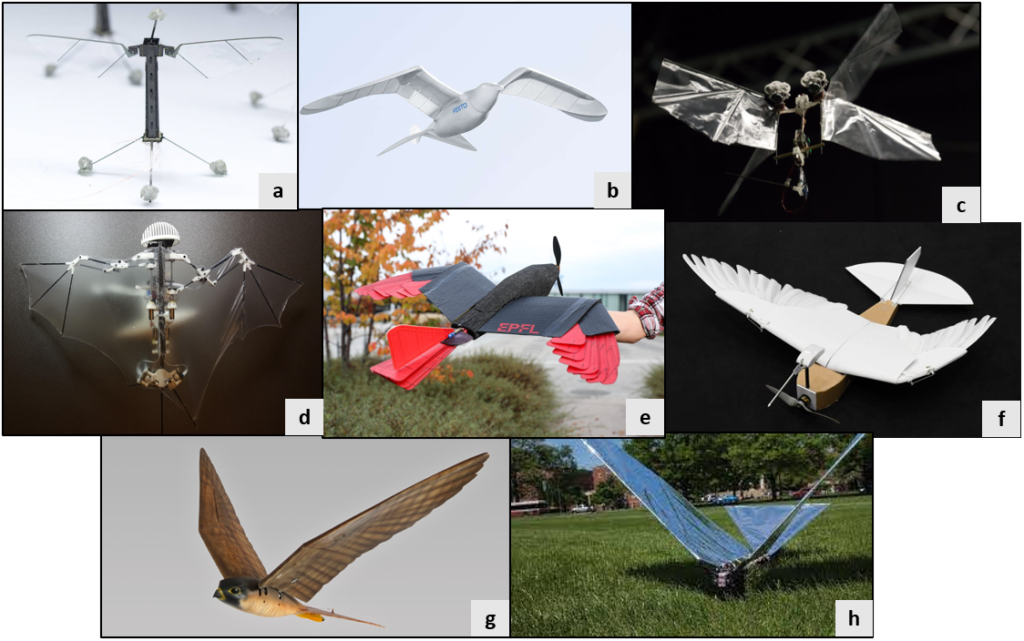
e. the LisHawk, f. the Pidegeonbot, g. the Robird and h. the Robo Raven.