Research Overview
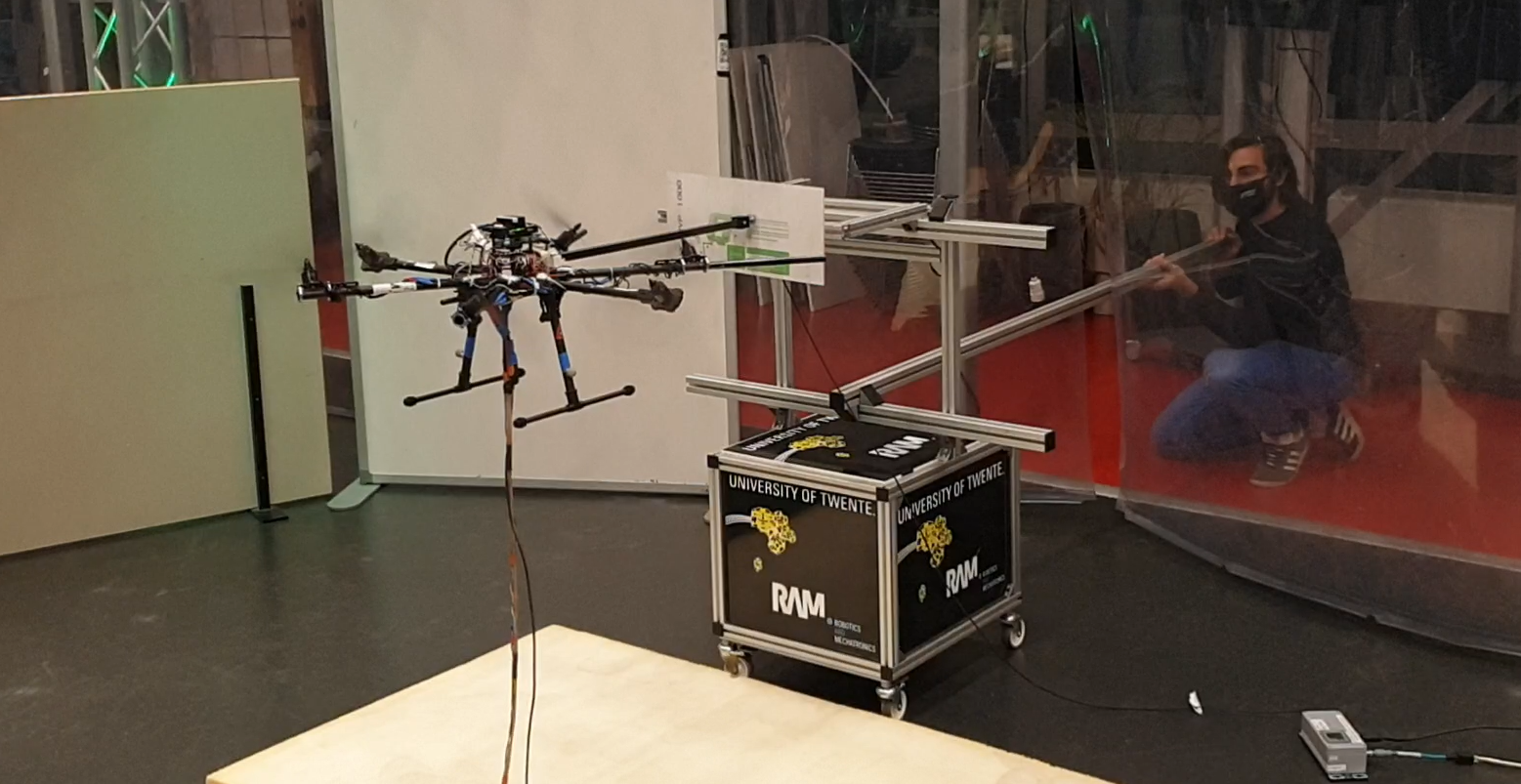
In this work, we design an energy-aware impedance control approach for aerial physical interaction in the port-Hamiltonian framework. Our objective is to enhance the basic geometric impedance control approach with wrench regulation capabilities by modulating the stiffness of the spatial springs of the controller. By an analysis of the wrench-regulation error dynamics we prove its convergence for quasi-static interaction tasks. In order to guarantee contact stability and safe interaction, we extend the variable-impedance controller using the concepts of energy tanks and energy routing.
The intuitive idea of an energy-tank is that it stores the energy dissipated by the control system and uses it to implement control actions that could violate the passivity of the closed-loop system, for instance the regulation of the interaction wrench in our case. On top of that, energy tanks allow the energy flow within the system to be observed and used for embedding high-level control objectives, such as safety, thus the controller becomes more energy-aware.
Publications
| Ramy Rashad, Davide Bicego, Jelle Zult, Santiago Sanchez-Escalonilla, Ran Jiao, Antonio Franchi, Stefano Stramigioli (2022) Energy Aware Impedance Control of a Flying End-Effector in the Port-Hamiltonian Framework, IEEE Transactions on Robotics 38(6), p. 3936-3955, IEEE, doi:10.1109/TRO.2022.3183532 |
| Ramy Rashad, Johan B. C. Engelen, Stefano Stramigioli (2019) Energy Tank-Based Wrench/Impedance Control of a Fully-Actuated Hexarotor: A Geometric Port-Hamiltonian Approach, 2019 International Conference on Robotics and Automation (ICRA) 2019-May, p. 6418-6424, IEEE, doi:10.1109/ICRA.2019.8793939 |