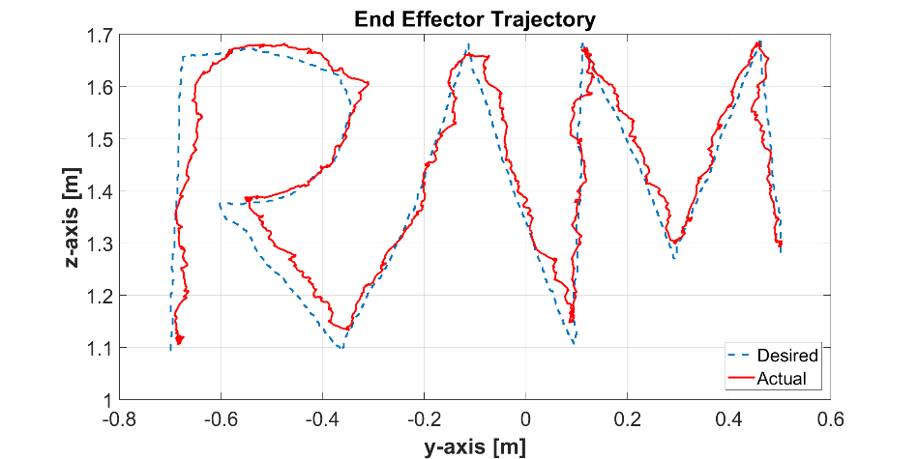
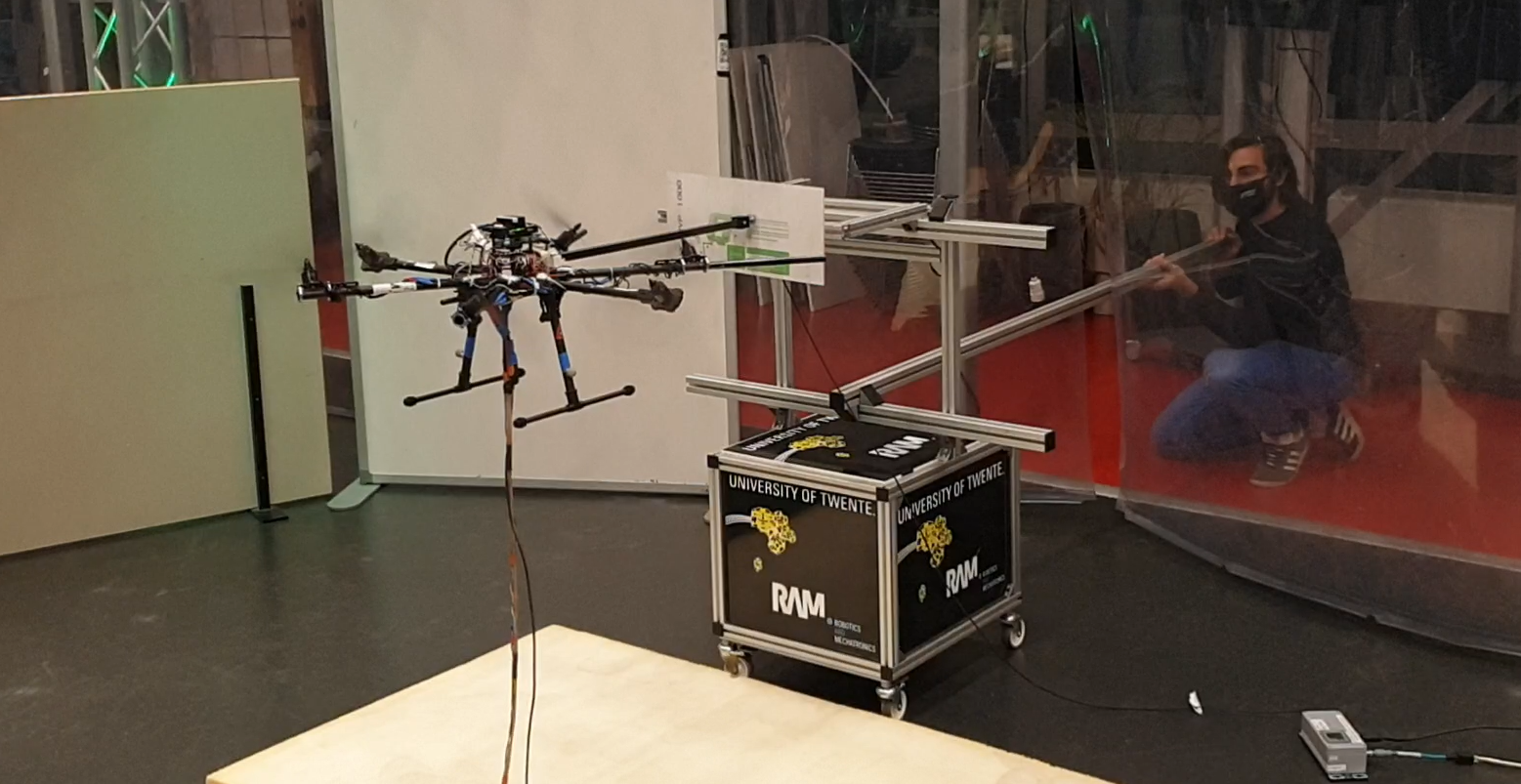
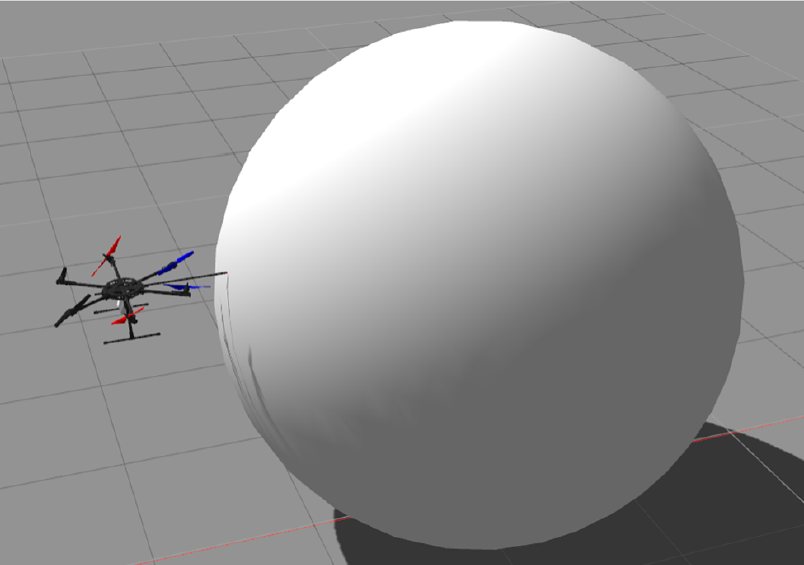
In this article, the software and hardware architecture of the Fully actuated aerial robot developed at the Robotics and Mechatronics department used for the experimental validation of the […]
Aerial Physical Interaction / Energy Tanks
Posted on:
Energy Aware Impedance Control
Research Overview In this work, we design an energy-aware impedance control approach for aerial physical interaction in the port-Hamiltonian framework. Our objective is to enhance the basic geometric […]
Aerial Physical Interaction
Posted on:
Physical Sliding with Unknown surface
Research Overview This work focuses on the automatic aerial contact-based sliding interaction (inspection/cleaning) tasks in aerial robotics allowing a 3D force with a constant norm to be applied […]
Aerial Physical Interaction
Posted on:
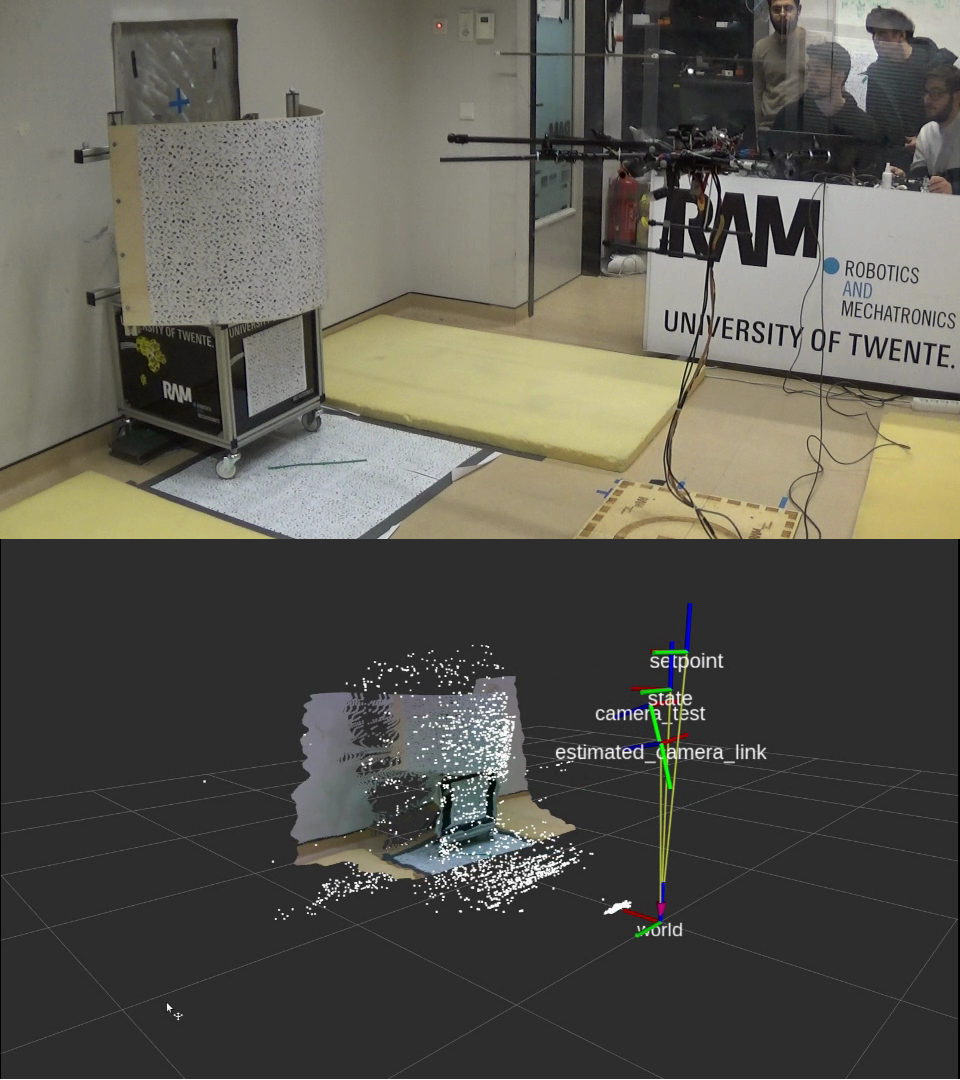
Vision-based impedance control
Research Overview The integration of computer vision techniques for the accomplishment of autonomous interaction tasks represents a challenging research direction in the context of aerial robotics. In this […]

Aerial Physical Interaction
Posted on:
Bayesian-optimized impedance control
BEST PAPER AWARD WINNER OF IEEE SSRR 2019 Research Overview In impedance control, the contact force between the UAV’s end-effector and the environment is directly related to the […]

Aerial Physical Interaction
Posted on:
Geometric Impedance Control
Research Overview In this work, we consider the problem of interaction control of fully-actuated UAVs in the port-Hamiltonian framework. The interaction behavior of an aerial robot can be […]