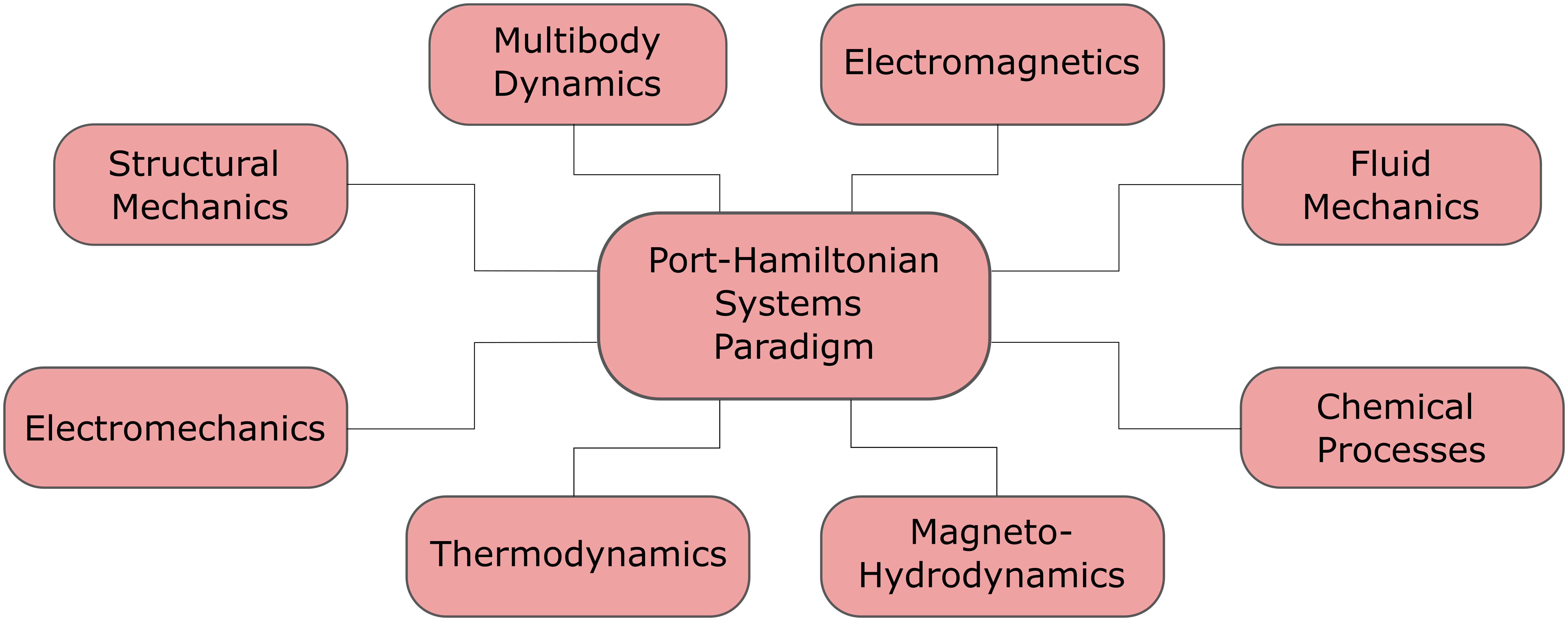
Research Overview The port-Hamiltonian (pH) systems paradigm is a framework for the modeling, analysis, design, and control of complex dynamical systems. The mentioned complexity arises due to multi-physical […]
Awards
Posted on:
IEEE SSRR 2019 Best Paper Award
During the IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), our work on Bayesian-optimized based impedance control won the Best Paper Award ! The paper was presented […]

Aerial Physical Interaction
Posted on:
Bayesian-optimized impedance control
BEST PAPER AWARD WINNER OF IEEE SSRR 2019 Research Overview In impedance control, the contact force between the UAV’s end-effector and the environment is directly related to the […]

Aerial Physical Interaction
Posted on:
Geometric Impedance Control
Research Overview In this work, we consider the problem of interaction control of fully-actuated UAVs in the port-Hamiltonian framework. The interaction behavior of an aerial robot can be […]

Dissemination
Posted on:
ICRA2019 Poster
My poster presentation at the 2019 IEEE International Conference on Robotics and Automation (ICRA) which was held on 20-24 May 2019 in Montreal, Canada. The poster summarizes our conference […]

Dissemination
Posted on:
Open House RAM UTwente
On Saturday 12 July, the University of Twente opened its beautiful campus to the general public to visit our Robotics and Mechatronic (RAM) Lab. During the Open House, children […]

Dissemination
Posted on:
Seminar: Studium Generale UTwente
My Talk at the Studium Generale Symposium at the University of Twente, Enschede, The Netherlands. The symposium presents to the general public the current and emerging applications of […]
Nonlinear Control
Posted on:
Quadrotor Control
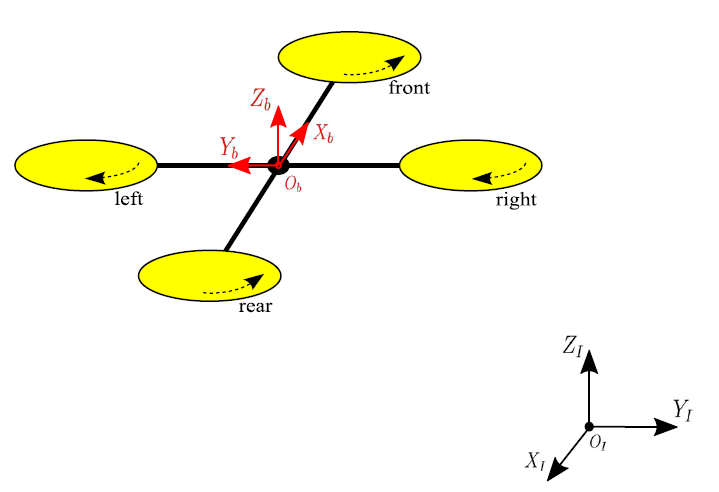
Research Overview Unmanned Aerial Vehicles (UAVs) have attracted many researchers with different specialties during the last decade. One of the most popular vehicles is the quadrotor helicopter. Quadrotor […]

Nonlinear Control
Posted on:
Twin Rotor MIMO system
Research Overview The twin rotor MIMO system (TRMS) is a aerodynamical laboratory setup which resembles a helicopter prototype designed for flight control experiments. The control system design of […]
Nonlinear Control
Posted on:
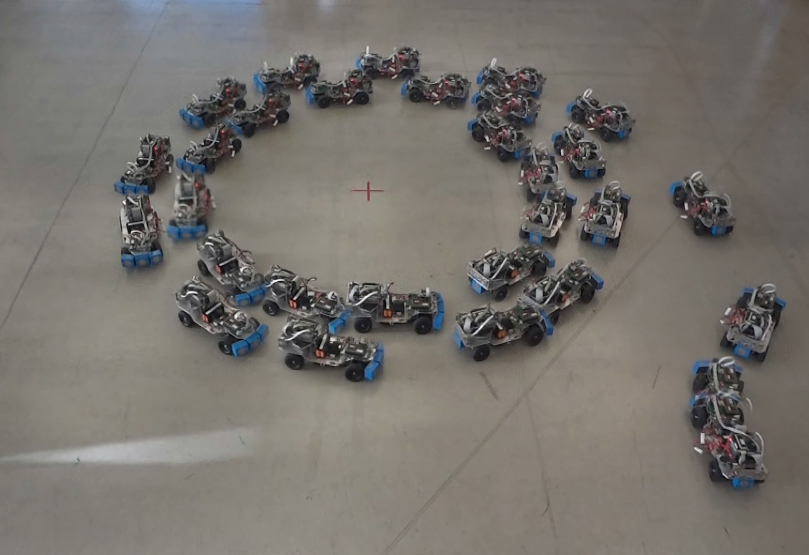
Dynamic trajectory tracking of a car-like robot
Research Overview This video summarizes my BSc thesis work done at the Julius Maximilians University Weurzburg, Germany as part of my BSc degree in Mechatronics at the German […]