Math & Physics

Dissemination
Posted on:
Portwings Project Overview
PortWings is a ERC-2018 Advanced grant awarded to S. Stramigioli in the period Sep. 2018- Mar. 2024. The main goal of the project is to understand the secrets […]
Computational Physics
Posted on:
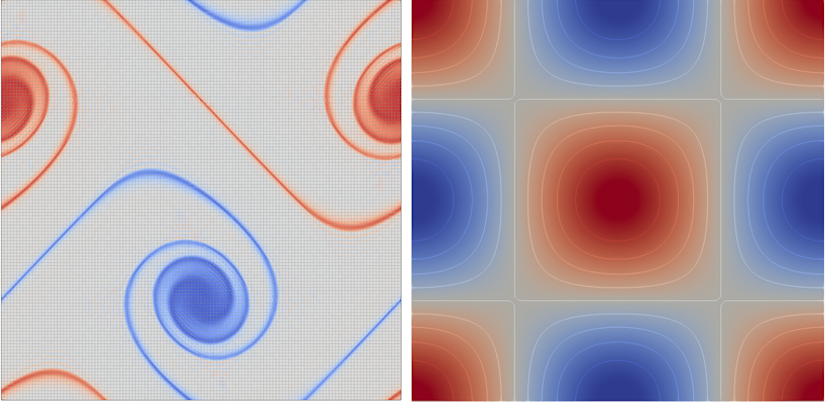
Dual-field discretization of Navier-Stokes equations: Scalar-valued exterior calculus
Research Overview In this ongoing research, we work on the structure-preserving discretization of the incompressible Navier-Stokes (NS) equations [math] \partial_t v + \omega\times v + \frac{1}{\text{Re}} \text{curl}(\omega)+ \text{grad}(p) […]
Aerial Physical Interaction
Posted on:
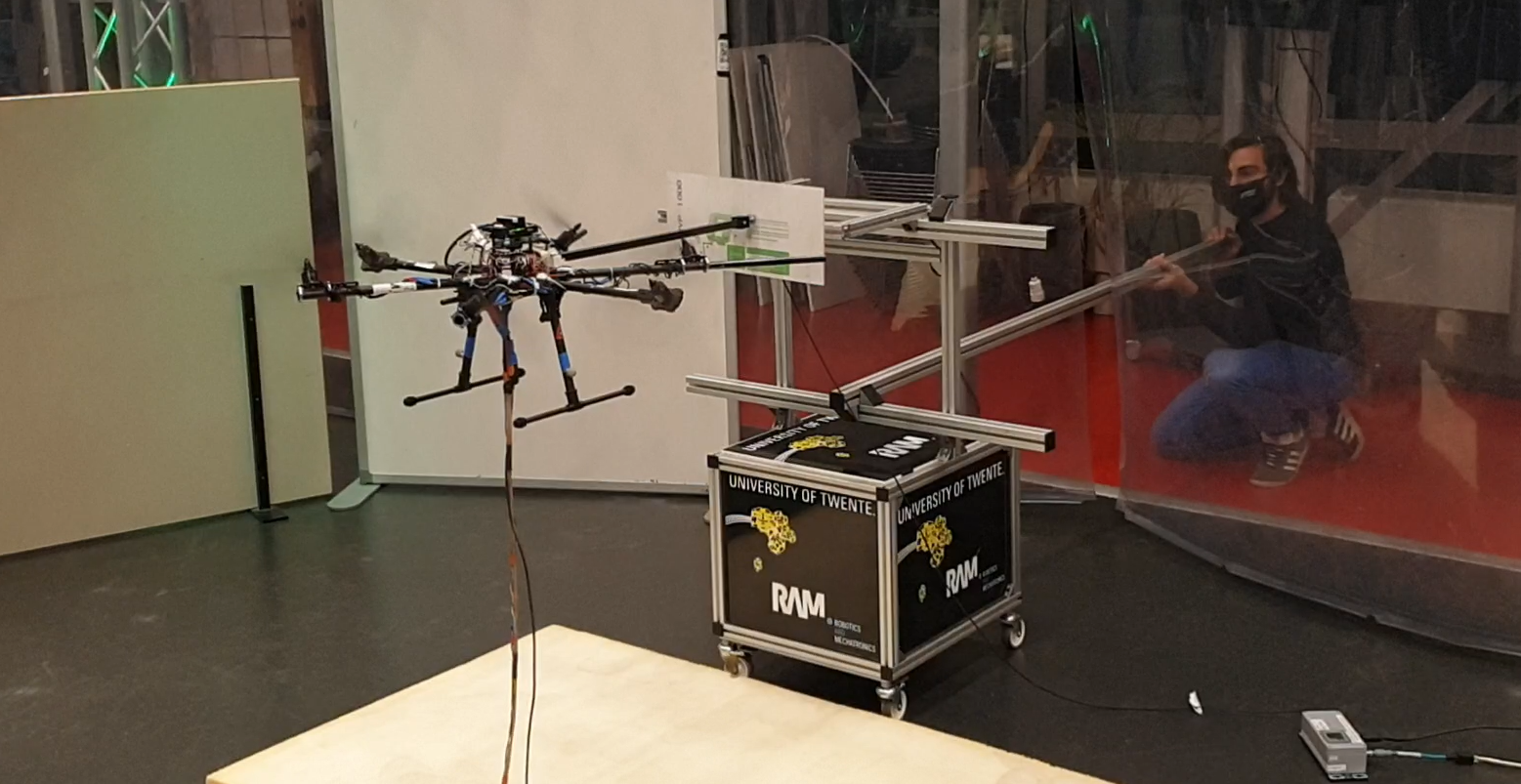
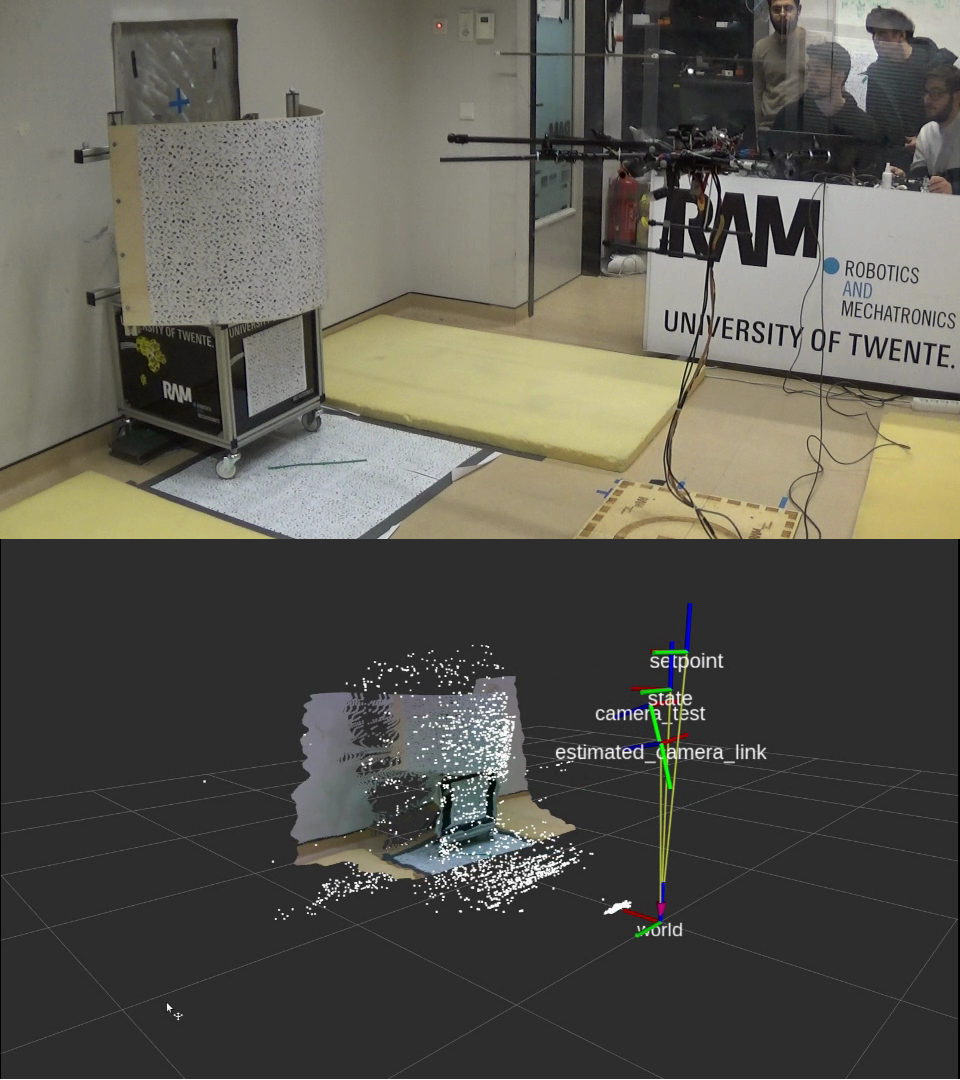
Software and Hardware Architecture of Aerial Robot
In this article, the software and hardware architecture of the Fully actuated aerial robot developed at the Robotics and Mechatronics department used for the experimental validation of the […]

Computational Physics
Posted on:
pHyem library
phyem is an open-source finite element library that bridges port-based thinking to numerics and enables LEGO-like simulations. The name, pHyem, stands for Python + Port-Hamiltonian + FEM + Physics. The project’s […]

Dissemination
Posted on:
Portwings Workshop Presentation
My presentation titled “Geometric Formulation & Structure-Preserving Discretization of Fluid-Structure-Interaction” in the ERC-Portwings Workshop held at the Robotics and Mechatronics group, University of Twente, on the 27th of […]

Dissemination
Posted on:
euROBIN workshop on Energy-efficient flapping-wing robots
As an invited speaker at the workshop “Energy-efficient flapping-wing robots” organized by the GRVC Robotics Laboratory of the School of Engineering of the University of Seville and the […]

Dissemination
Posted on:
USNCCM17 Presentation
This video is my presentation on the journal article “Intrinsic Nonlinear Elasticity: An Exterior Calculus Formulation” at the 17th U.S. National Congress on Computational Mechanics (USNCCM17), in Albuquerque, […]
Geometric Modeling
Posted on:
Nonlinear Elasticity
Research Overview Identifying the underlying structure of partial differential equations is a fundamental topic in modern treatments of continuum mechanics and field theories in general. Not only does […]

Dissemination
Posted on:
IEEE ICRA 2023 Presentation
My Talk at IEEE ICRA 2023 in London on 31 May 2023 presenting our IEEE TRO paper on Energy Aware Impedance Control of a Flying End-Effector in the […]
Energy Tanks
Posted on:
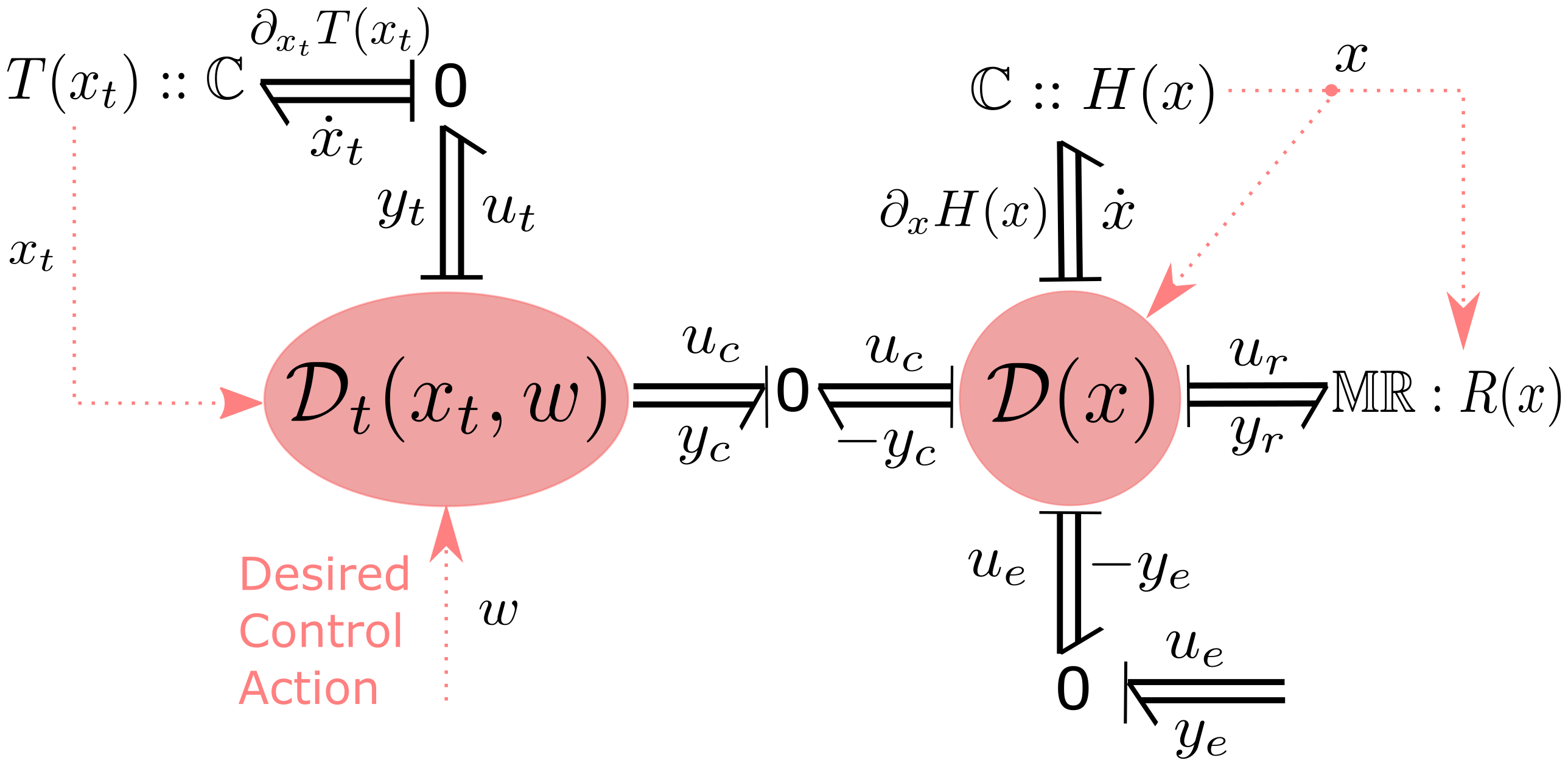
Introduction to Energy Tanks
Research Overview In this work we describe and discuss energy tanks, a control algorithm which has gained popularity inside the robotics and control community over the last years. […]
Geometric Modeling
Posted on:
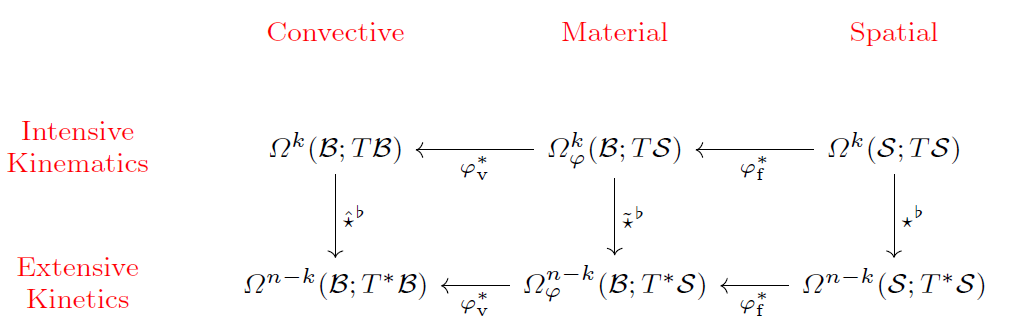
Fourier-Navier-Stokes equations
Research Overview In this paper, we present a comprehensive description of thermodynamics in a differential geometric setting for a general non-relativistic continuum mechanical system. In order to deal […]

Computational Physics
Posted on:
Dual-field Finite Element Exterior Calculus
Research Overview In this work we propose a novel approach to discretize linear port-Hamiltonian systems while preserving the underlying structure. We present a finite element exterior calculus formulation […]
Aerial Physical Interaction / Energy Tanks
Posted on:
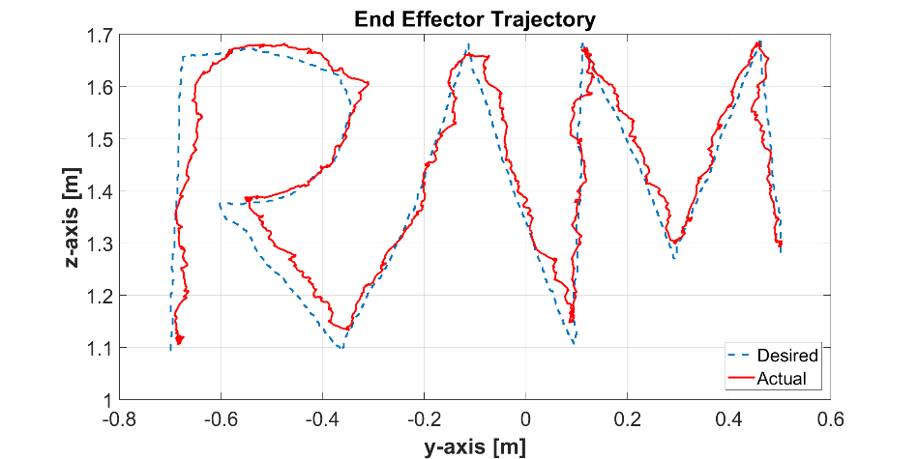
Energy Aware Impedance Control
Research Overview In this work, we design an energy-aware impedance control approach for aerial physical interaction in the port-Hamiltonian framework. Our objective is to enhance the basic geometric […]

Awards
Posted on:
Georges Giralt PhD Award 2022 Finalist
Ramy Rashad has been selected as a finalist for the Georges Giralt PhD Award 2022 presented at the European Robotics Forum, organized by the University of Twente at […]

Dissemination
Posted on:
ICRA2022 Workshop
Workshop Details Full-day workshop at the 2022 IEEE International Conference on Robotics and Automation (ICRA) which took place on May 27th 2022 in Phialdelphia, USA. Organized by: Ramy […]
Geometric Modeling
Posted on:
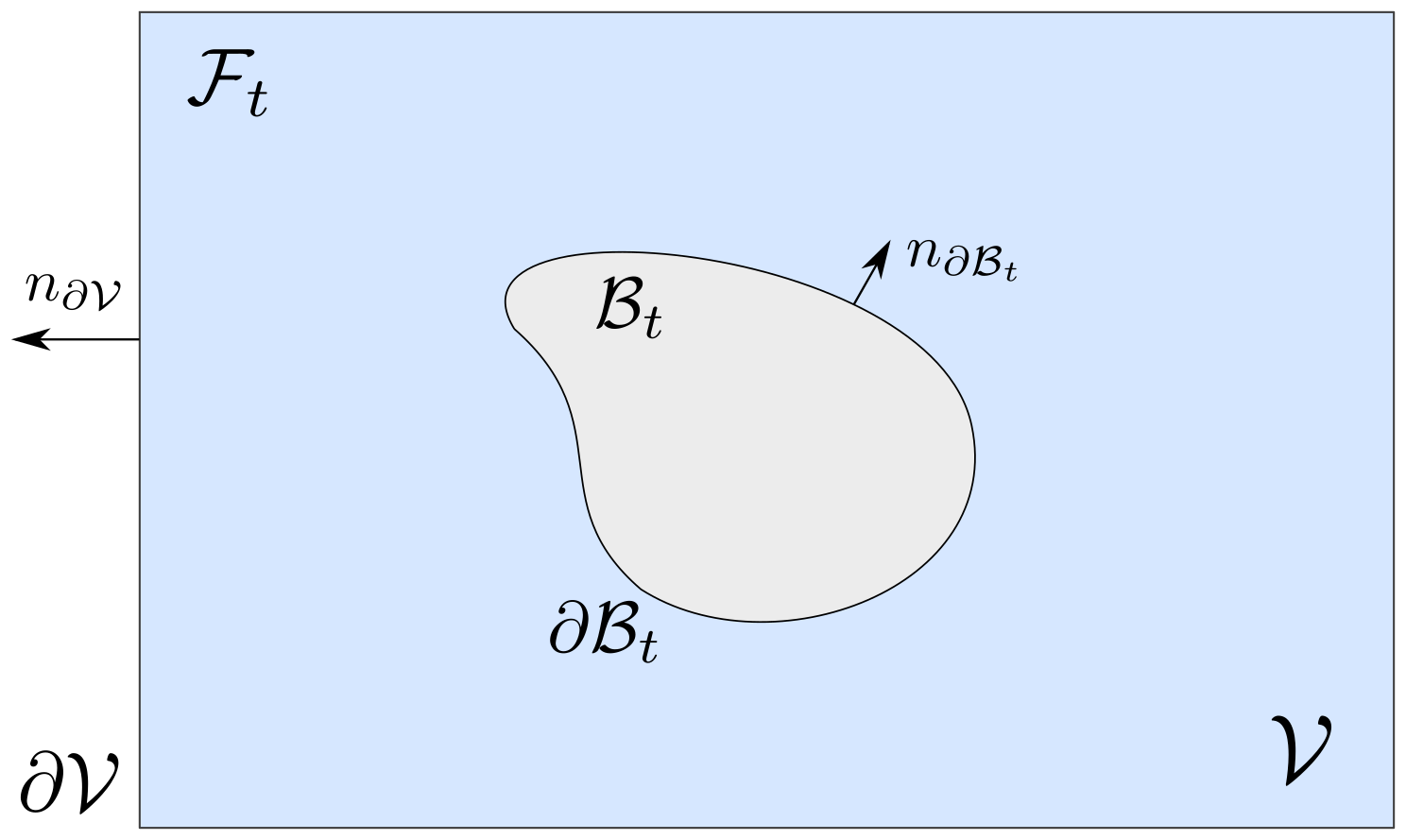
Fluid-Structure-Interaction
Research Overview The goal of this work is to extend the existing port-Hamiltonian theory of open distributed parameter systems on fixed spatial domains to the practically relevant case […]
Geometric Modeling
Posted on:
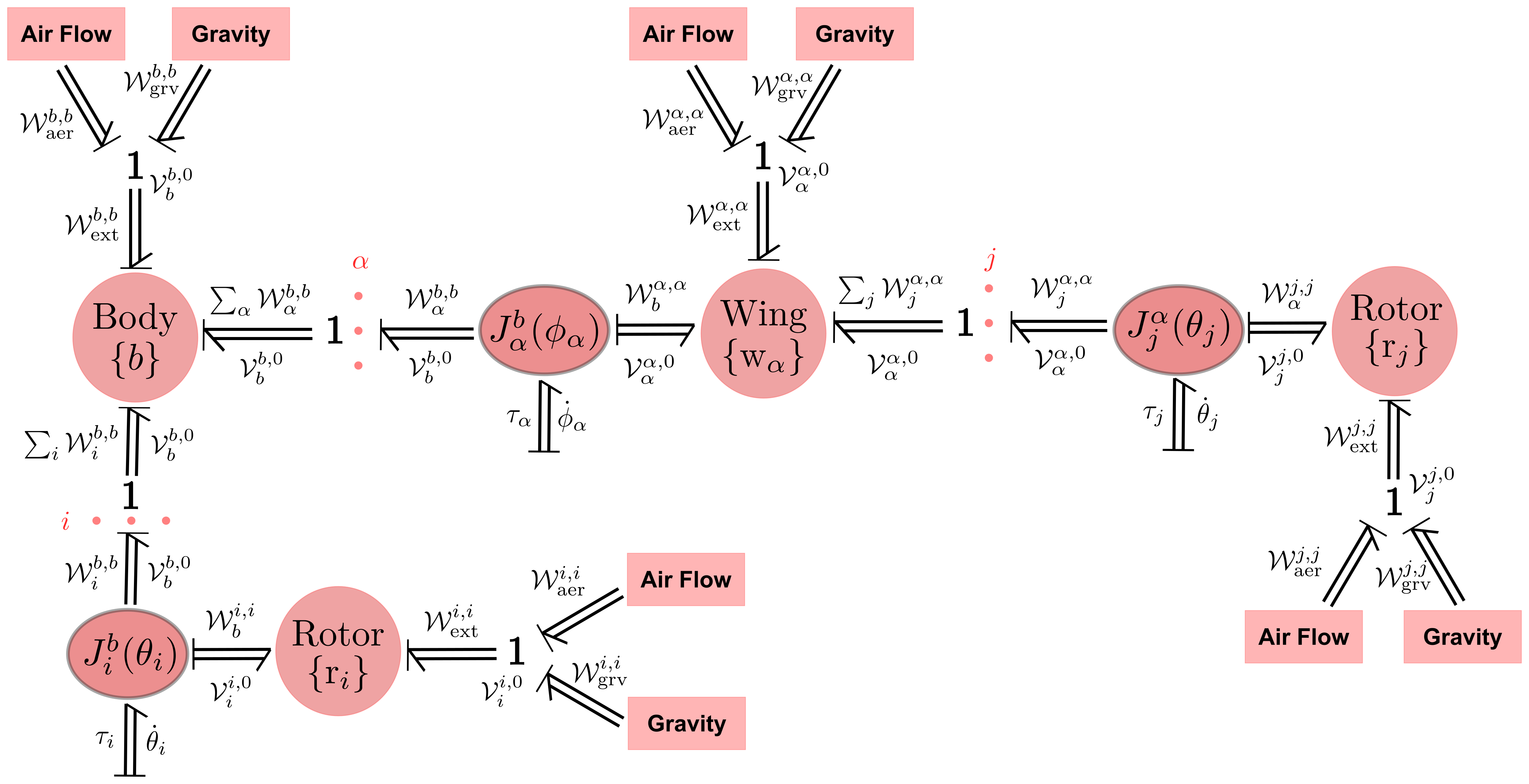
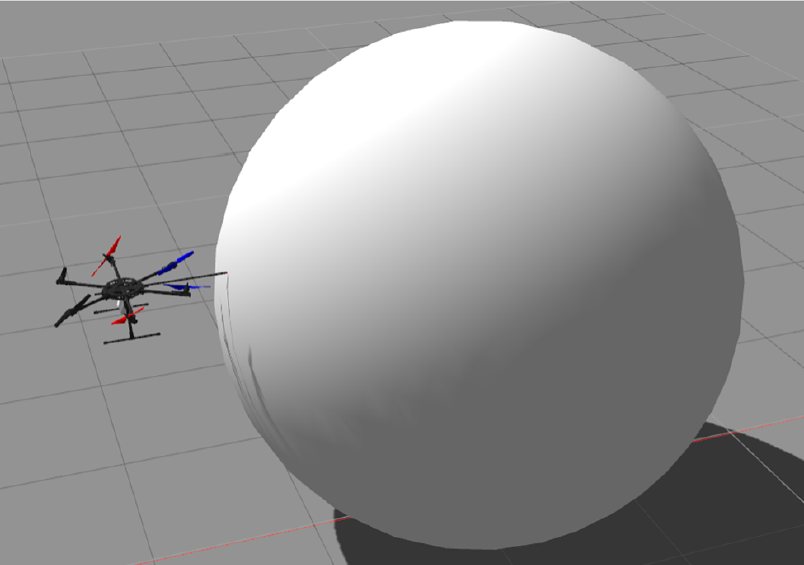
Multirotor UAVs
Research Overview In this paper we present a systematic modeling framework for generic MAVs that encompasses a wide spectrum of possible designs. We assume the MAVs are driven […]
Computational Physics
Posted on:
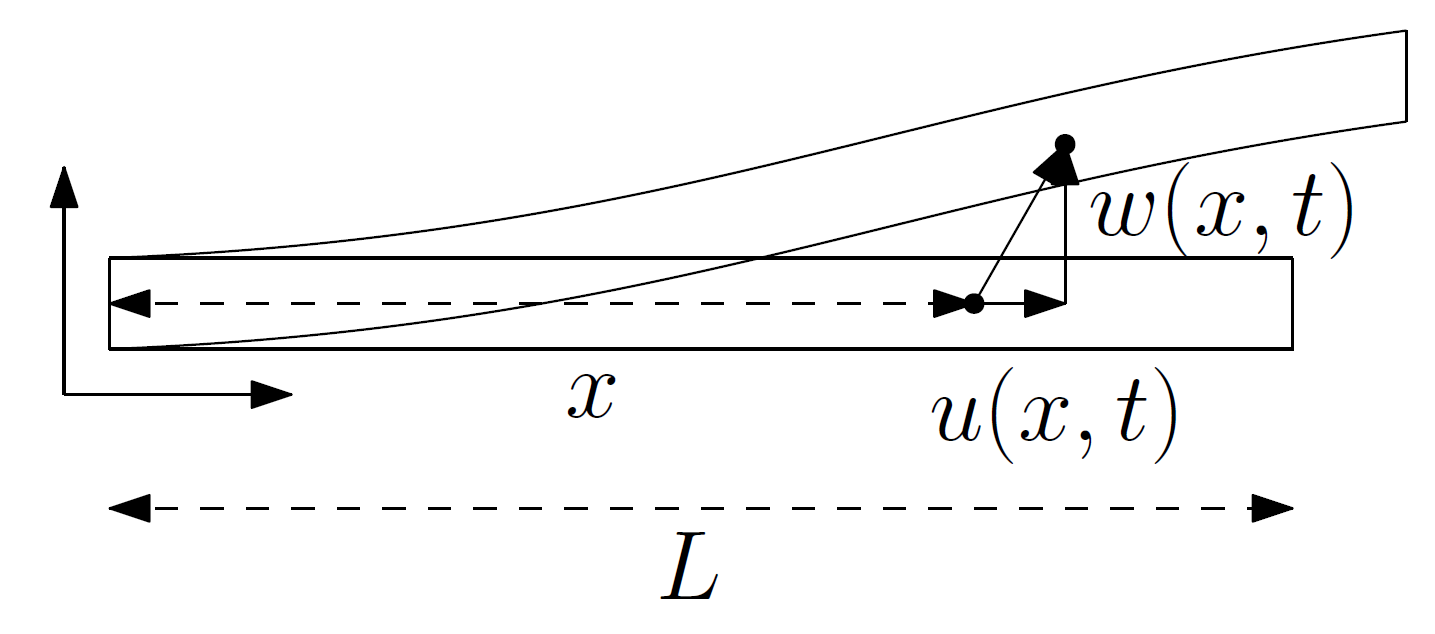
FEM of von Karman Beams
Research Overview In this contribution, the von Karman beam model is formulated as a port-Hamiltonian system. The selection of energy variables will be such to make the Hamiltonian […]

Dissemination
Posted on:
IFAC LHMNC21 Presentation
This video is my presentation on the paper “Exterior and Vector Calculus Views of Incompressible Navier-Stokes Port-Hamiltonian Models” at the 7th IFAC Workshop on Lagrangian and Hamiltonian Methods […]
Aerial Physical Interaction
Posted on:
Physical Sliding with Unknown surface
Research Overview This work focuses on the automatic aerial contact-based sliding interaction (inspection/cleaning) tasks in aerial robotics allowing a 3D force with a constant norm to be applied […]

Geometric Modeling
Posted on:
Navier-Stokes Equations
Research Overview The specific aim of this work is to extend the port-Hamiltonian formulation of ideal compressible fluids (Euler equations) to Newtonian viscous fluids (Navier–Stokes equations). The way […]

Dissemination
Posted on:
Webinar: H.V.Ockham UTwente
Title: Unmanned Aerial Vehicles: Now and Then Abstract: What the Wright brothers did on the 17th of December 1903 was a steppingstone for humanity in its quest to conquer […]
Overview Papers
Posted on:
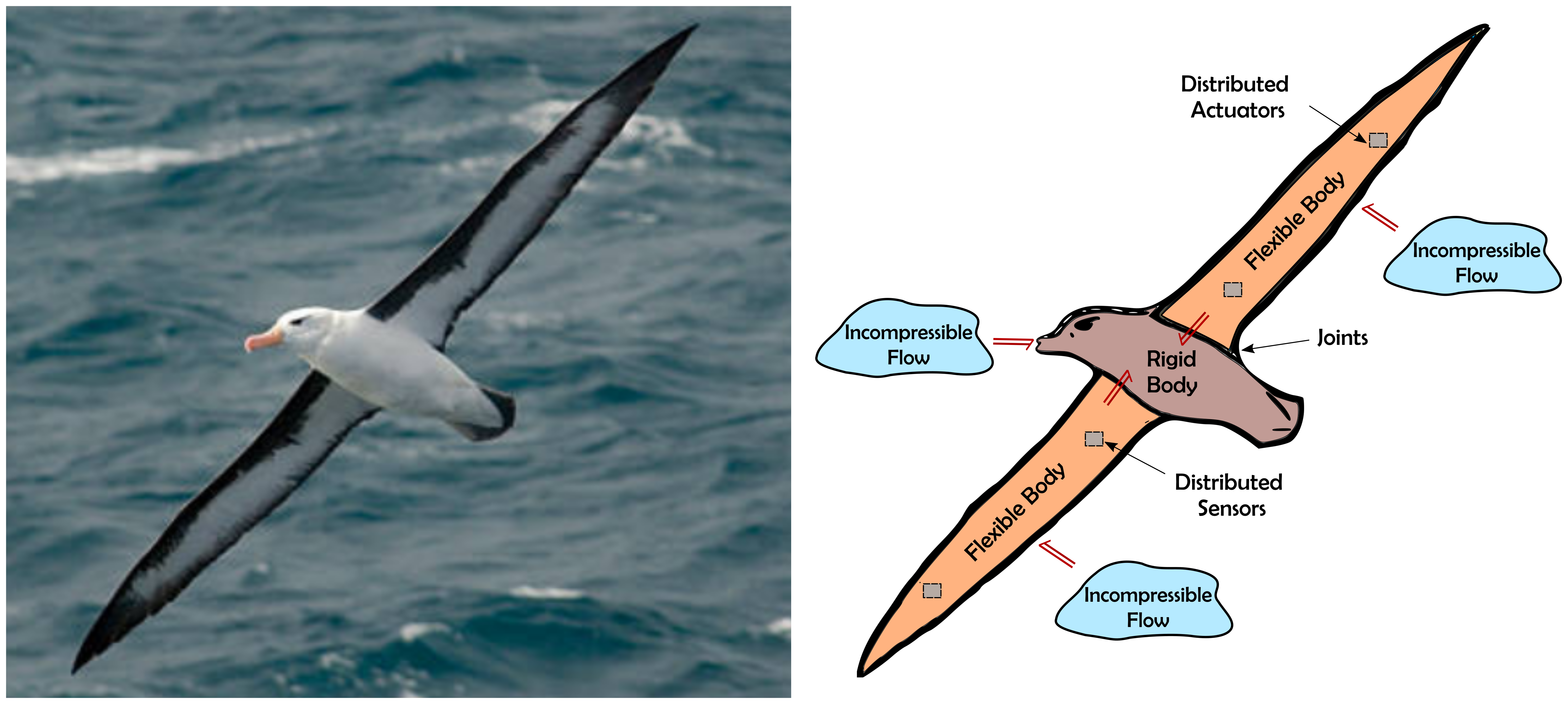
Portwings Project
Research Overview Flapping flight is one of the wonders of nature and has been studied vastly by biologists and fluid dynamicists. The level of dexterity, efficiency and grace […]

Geometric Modeling
Posted on:
Ideal Fluid Flow
Research Overview Fluid mechanics has been studied in the literature using both the Lagrangian and Hamiltonian formalism. In the classical Hamiltonian theory for fluid dynamical systems, a fundamental […]

Overview Papers
Posted on:
Fully-actuated Multirotor UAVs
Research Overview Several fully-actuated multirotor platforms have been introduced in the past decade to overcome the underactuation property of conventional multirotors. Full-actuation has been mainly realized by two […]

Overview Papers
Posted on:
UAVs Now and Then
This article has been published as part of Ch.1 of my PhD thesis UAVs Then What the Wright brothers did on the 17th of December 1903 was a […]
Geometric Modeling
Posted on:
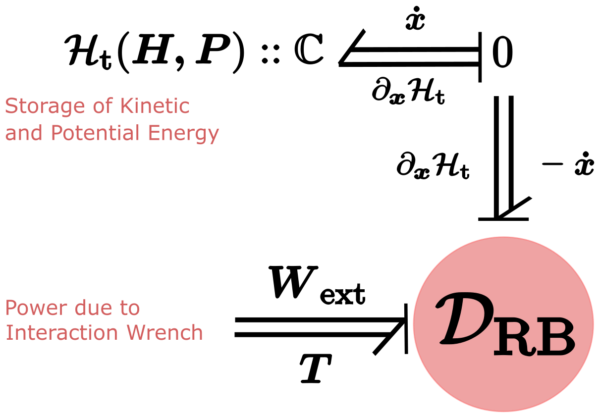
Rigid Body Dynamics
This work has been published as Ch.4 of my PhD thesis. The study of rigid body modeling is central to the mathematical theories of robotics. The topic of […]
Aerial Physical Interaction
Posted on:
Vision-based impedance control
Research Overview The integration of computer vision techniques for the accomplishment of autonomous interaction tasks represents a challenging research direction in the context of aerial robotics. In this […]